Dnešné zariadenia na generovanie točivého pohybu antagonistickým aktuátorom s pneumatickými umelými svalmi sú štandardne riešené prostredníctvom kruhovej kladky, na ktorej je navlečený ohybný pás, ktorého konce sú spojené s umelými svalmi.
Dnešné zariadenia na generovanie točivého pohybu antagonistickým aktuátorom s pneumatickými umelými svalmi sú štandardne riešené prostredníctvom kruhovej kladky, na ktorej je navlečený ohybný pás, ktorého konce sú spojené s umelými svalmi.
Pri takomto riešení s rastúcim pootočením ramena aktuátora však klesá krútiaci moment aj tuhosť aktuátora. Je to dôsledok nelineárneho poklesu síl umelých svalov v závislosti od ich kontrakcie. Pomocou aplikácie oválnej vačky je preto snaha zabezpečiť menší pokles krútiaceho momentu, a tým aj väčšiu a symetrickú tuhosť aktuátora s pneumatickými umelými svalmi.
Aktuátor, pozostávajúci z pneumatických umelých svalov (PUS) v antagonistickom zapojení, predstavuje výrazne nelineárny systém, v ktorom sa nelineárne mení tlak vzduchu vo svaloch s uhlom natočenia ramena aktuátora [1]. Táto nelinearita vzniká v dôsledku nelineárneho poklesu sily svalov v závislosti od ich kontrakcie. Charakter tejto nelinearity spôsobuje pokles krútiaceho momentu, takže s rastúcim uhlom natočenia ramena aktuátora nelineárne klesá aj jeho krútiaci moment a tuhosť [2], [3]. Odstránenie, resp. potlačenie tohto javu je možné vtedy, keď namiesto kladky s konštantným polomerom rotujúcej okolo jej geometrického stredu aplikujeme oválnu vačku s polomerom otáčania narastajúcim v závislosti na pootočení hriadeľa. Týmto možno dosiahnuť menší pokles krútiaceho momentu na hriadeli aktuátora, a tým aj jeho väčšiu a symetrickú tuhosť.
CHARAKTERISTIKY PUS
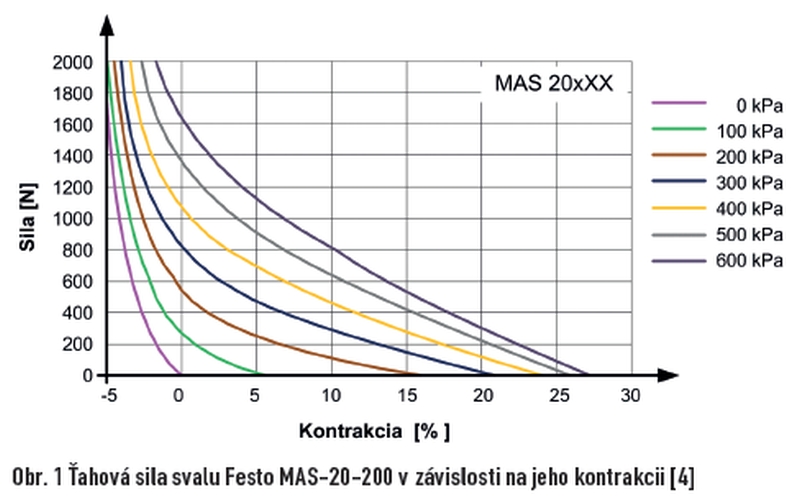
Charakteristiky znázorňujúce závislosť sily F umelého svalu FESTO MAS-20-250N na kontrakcii κ pri konštantnom tlaku p sú zobrazené na obrázku č. 1. Tieto charakteristiky sú uvádzané výrobcom svalu pre sedem hodnôt tlakov a ich priebeh možno vyjadriť funkciou predstavujúcou závislosť sily svalu na kontrakcii a tlaku [4]. Uvedené svaly majú maximálnu
kontrakciu κmax = 25 %.
MOMENTOVÁ CHARAKTERISTIKA AKTUÁTORA S PUS
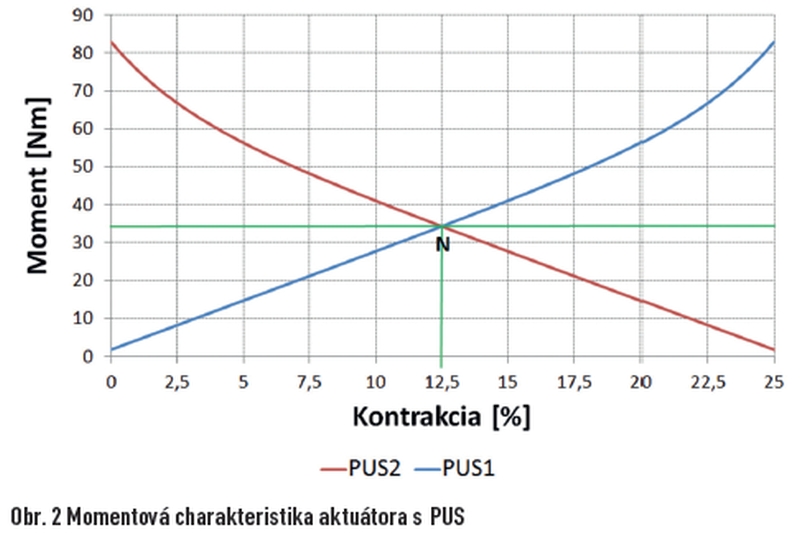
Závislosť krútiaceho momentu aktuátora na kontrakcii svalov je zobrazená na obrázku č. 2. V bode N majú svaly rovnaké plniace tlaky, hodnota kontrakcie svalov je približne 12,5 percenta, krútiaci moment a tuhosť sú maximálne. Tento krútiaci moment hriadeľa aktuátora je určený silou umelých svalov v danej polohe a konštantným polomerom kladky. Ak predpokladáme, že parametre obidvoch svalov sú rovnaké, potom platí:
![]()
kde M je moment na hriadeli aktuátora, F je sila umelých svalov a rkl je polomer kruhovej kladky.
Znižovaním tlaku v jednom svale sa kontrakcia druhého svalu zväčšuje a krútiaci moment na hriadeli aktuátora klesá. Rovnako to platí, aj keď sa rameno aktuátora natáča na opačnú stranu [5], [6]. S klesajúcim krútiacim momentom klesá aj tuhosť aktuátora a preto je možné konštatovať, že pri väčších pootočeniach má aktuátor nedostatočnú a asymetrickú tuhosť.
AKTUÁTOR S PUS A OVÁLNOU VAČKOU
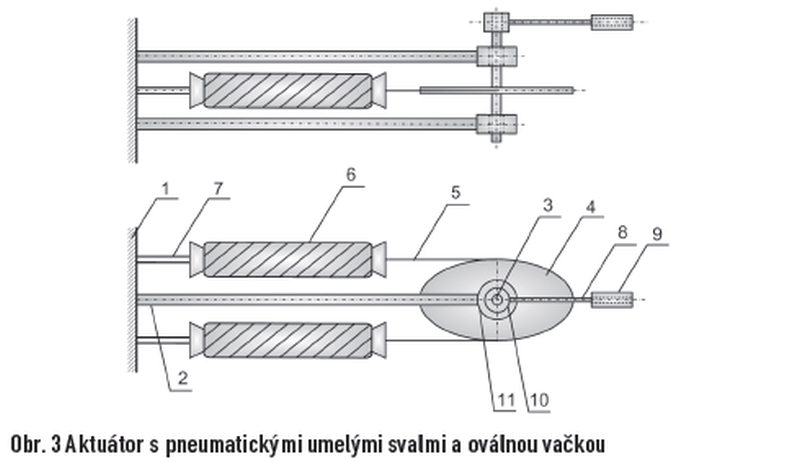
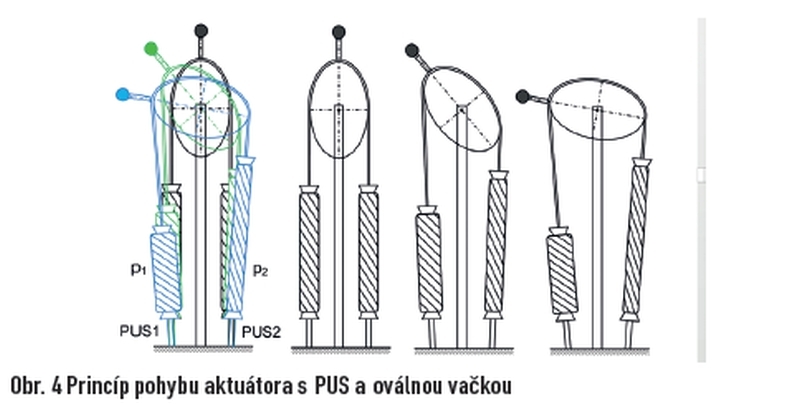
Pneumatický aktuátor s dvoma PUS a oválnou vačkou v antagonistickom zapojení je zobrazený na obrázku č. 3. Je tvorený základovou doskou (1) s pevne pripojenými dvoma stĺpikmi (2), ku ktorým sú pevne pripojené ložiskové puzdrá (11). Cez ne je vsunutý hriadeľ (3) pevne spojený s oválnou vačkou (4), po ktorej je prevlečený ohybný pás (5), ktorého konce sú spojené s pneumatickými umelými svalmi (6) a tieto sú opačným koncom pripevnené k zadným držiakom (7). Súčasne je na hriadeľ (3) pevne nasunutý náboj ramena (10), ktorý je spojený s ramenom (8) a to je spojené so záťažou (9) [7].
Princíp pohybu aktuátora s dvoma PUS a oválnou vačkou v antagonistickom zapojení je zobrazený na obrázku č. 4.
MOMENTOVÉ CHARAKTERISTIKY AKTUÁTORA S PUS A OVÁLNOU VAČKOU
Pre moment M aktuátora s umelými svalmi a oválnou vačkou platí:
![]()
kde F je sila svalu a d je kolmá vzdialenosť vektora sily svalu od osi oválnej vačky.
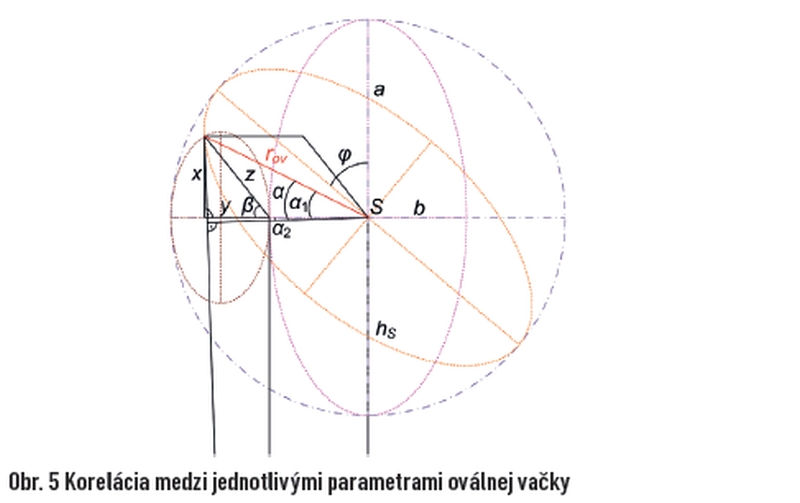
Základnými parametrami pre geometrický popis oválnej vačky aktuátora sú veľkosti hlavnej a vedľajšej polosi elipsy a, b a dĺžka ramena rov na ktorom pôsobí sila svalu, t.j. vzdialenosť bodu pôsobenia sily pneumatického umelého svalu od osi rotácie oválnej vačky (obr. 5).
Potom pre krútiaci moment aktuátora s PUS a oválnou vačkou dostaneme:
![]()
Jednotlivé veličiny je možné z obr. 5 vyjadriť nasledovne:
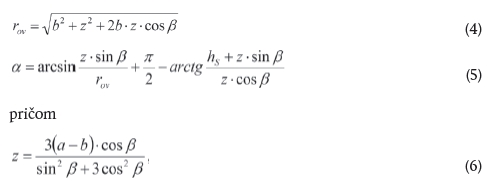
kde a je veľkosť hlavnej polosi elipsy (oválnej vačky), b je veľkosť vedľajšej polosi elipsy (oválnej vačky), hS je dĺžka aktuátora po stred oválnej vačky a β je uhol, ktorý zviera vedľajšia polos b s pomocnou veličinou z.
Závislosť uhla β na uhle natočenia ramena aktuátora φ s konštantným parametrom a bola aproximovaná polynomickou funkciou. V tomto prípade bol na dosiahnutie čo najlepšej aproximácie zvolený polynóm tretieho stupňa so siedmimi koeficientmi:
![]()
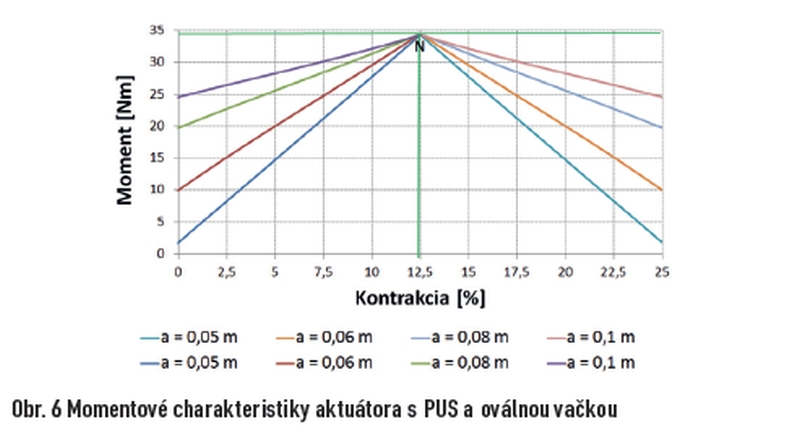
Ako výsledok vyššie uvedeného matematického popisu sú na obrázku č. 6 znázornené momentové charakteristiky aktuátora s PUS v antagonistickom zapojení pre rôzne veľkosti hlavnej polosi oválnej vačky, ktorej veľkosť vedľajšej polosi je konštantných 0,05 m. Momentové charakteristiky sú navzájom pre oba svaly opačne orientované; pneumatické umelé svaly majú v bode N rovnaký maximálny tlak 600 kPa.
ZÁVER
Z momentovej charakteristiky na obr. 2 a obr. 6 vyplýva, že pre aktuátor s kruhovou kladkou klesá krútiaci moment aktuátora nelineárne iba v závislosti na nelinearite sily umelého svalu. Pre aktuátor s oválnou vačkou je pokles krútiaceho momentu menší a je daný nielen nelinearitou umelého svalu, ale aj veľkosťou hlavnej polosi vačky (obr. 6). Je teda možné konštatovať, že použitím oválnej vačky je pokles krútiaceho momentu aktuátora nižší, a tým je možné dosiahnuť aj väčšiu tuhosť aktuátora s pneumatickými umelými svalmi v antagonistickom zapojení. Určenie optimálnej závislosti medzi hlavnou a vedľajšou polosou oválnej vačky bude predmetom ďalšieho výskumu.
Príspevok bol vypracovaný s podporou Štrukturálnych fondov Európskej únie, operačný program Výskum a vývoj, opatrenie 2.2 Prenos poznatkov a technológií získaných výskumom a vývojom do praxe. Názov projektu“ „Výskum a vývoj inteligentných nekonvenčných aktuátorov na báze umelých svalov“, ITMS projektu“ 26220220103. Podporujeme výskumné aktivity na Slovensku / Projekt je spolufinancovaný
zo zdrojov ES.
Literatúra:
[1] BORŽÍKOVÁ, J.: Nelineárne aproximácie statickej charakteristiky F=f(p,k) antagonistického systému. In: Zborník príspevkov ARTEP 2008, Stará Lesná, Február 20-22, 2008. Košice: TU v Košiciach, 2008. s. 4-1–5. ISBN 978-80-807-3981-2.
[2] BORŽÍKOVÁ, J.; PITEĽ, J.: Nonlinearity of Static Characteristics of the Antagonistic System. In: Sbornik trudov XXI Meždunarodnoj naučnoj konferencii „Matematičiskije metody v technike i technologijach MMTT-21“, Saratov, May 27 30, 2008. Saratov: SGTU, 2008. pp. 196 197. ISBN 978 5 7433 1933 6.
[3] TÓTHOVÁ, M.; BALARA, M.: Momentová charakteristika pneumatického aktuátora s umelými svalmi a osovo symetrickým excentrom. In: Zborník príspevkov ARTEP 2014, Stará Lesná, Február 5-7, 2014, Košice: TU v Košiciach, 2014, s. 26-1–7. ISBN 978-80-553-1580-5.
[4] Fluidní svaly DMSP/MAS [online] Pohony se zvláštními funkcemi 2004/10 [cit. 2014-01-09]. Dostupné na internete: .
[5] PITEĽ, J.; LÍŠKA, O.; JANÁČOVÁ, D.; CHARVÁTOVÁ, H.: Pneumatic Muscle Actuator for Industrial Robotic Applications. In: 2nd International Conference on Sensors and Materials Manufacturing Science (ICSMMS 2015), Paris, January 17–18, 2015, China: BOSI EDU, 2015, p. 5.
[6] VAGASKÁ, A. - BALARA, M.: Tuhosť a krútiaci moment rotačného aktuátora s umelými svalmi. Strojárstvo EXTRA, 2013. roč. XVII., č. 6/2013, s. 92-94. ISSN 1335-2938.
[7] BALARA, M.; PITEĽ, J.; TÓTHOVÁ, M.; VAGASKÁ, A.: Aktuátor s umelými svalmi. Patent č. 288296. Banská Bystrica: ÚPV SR, 2015, 6 s.
TEXT/FOTO Ing. Mária Tóthová, PhD., doc. Ing. Milan Balara, PhD., Fakulta výrobných technológií Technickej univerzity v Košiciach so sídlom v Prešove