 Základnou požiadavkou pri kontinuálnom spracovaní rôznych materiálov je presne definovaný časový priebeh ťahu, čo vyžaduje bezchybnú prípravu regulácie.
Základnou požiadavkou pri kontinuálnom spracovaní rôznych materiálov je presne definovaný časový priebeh ťahu, čo vyžaduje bezchybnú prípravu regulácie.
V nasledujúcom príspevku je pre riešenie popísaného typu úloh navrhnutá regulačná štruktúra s referenčným modelom, ktorej stabilita je odvodená na báze II. Ljapunovovej metódy. Táto štruktúra vykazuje optimálne dynamické vlastnosti v zmysle kritéria minimálnej regulačnej odchýlky a minimálnej vstupnej energie, ktoré je štandardne používané v regulačných obvodoch.
Hlavná myšlienka metódy spočíva v rozšírení algoritmu riadenia systému o novú prídavnú informáciu, ktorú vieme jednoducho získať z výstupnej veličiny systému, a ktorá zabezpečí, aby v ustálenom stave bola regulačná odchýlka výstupnej veličiny nulová. Ak potom navrhneme riadenie linky pre tento rozšírený systém tak, aby bol asymptoticky stabilný s predpísanou dynamikou, tak to automaticky zabezpečí požadovaný cieľ riadenia v ustálenom stave a veľmi kvalitne v prechodových stavoch.
Popis centrálnej časti kontinuálnej linky
Kontinuálne linky (KL) sú technologické zariadenia na spracovanie spojitého toku materiálu (napríklad pásov plechu, rúr, papierenské a tlačiarenské linky a pod.) Jeho ťahom v oblasti pružných alebo plastických deformácií, čím sa ovplyvňujú jeho mechanické vlastnosti.
Stredná časť KL s dvoma strojmi je z hľadiska riadenia nelineárny MIMO systém 3. rádu s dvoma vstupmi [I1z, I2z] a dvoma výstupmi [F; v2], na ktorý môžu pôsobiť dve aditívne poruchy [F01, F23]. Predpokladajme, že menič má proporcionálny prenos a zabudovanú podradenú prúdovú slučku, ktorej časová konštanta je podstatne kratšia ako časové konštanty ostatných podsystémov strednej časti KL. Bloková schéma strednej časti KL (Matlab/Simulink) je za týchto predpokladov uvedená na obr. 1.
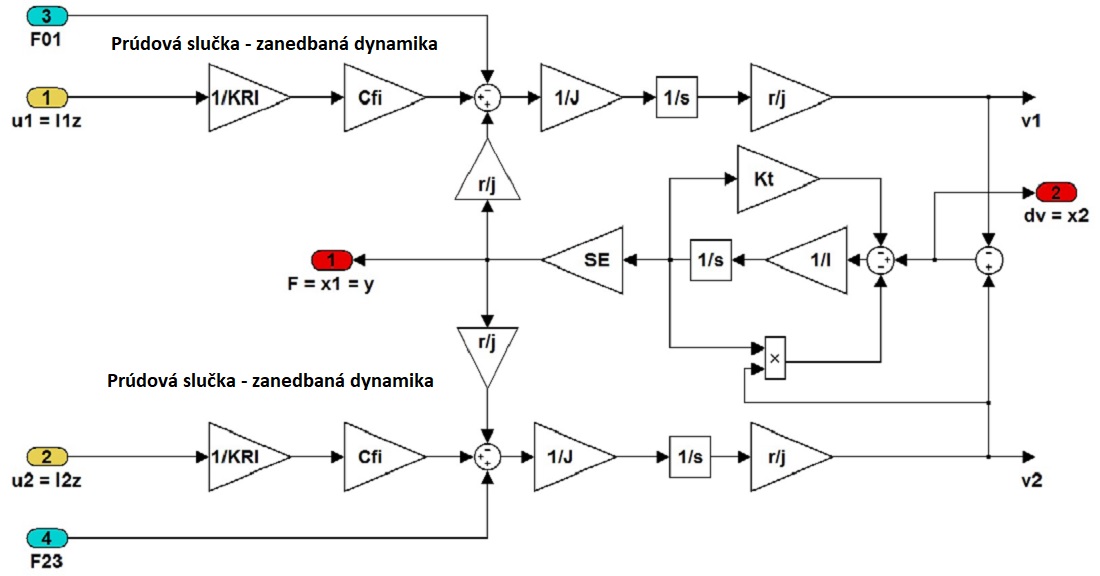 |
| Obr. 1: Bloková schéma strednej časti kontinuálnej linky |
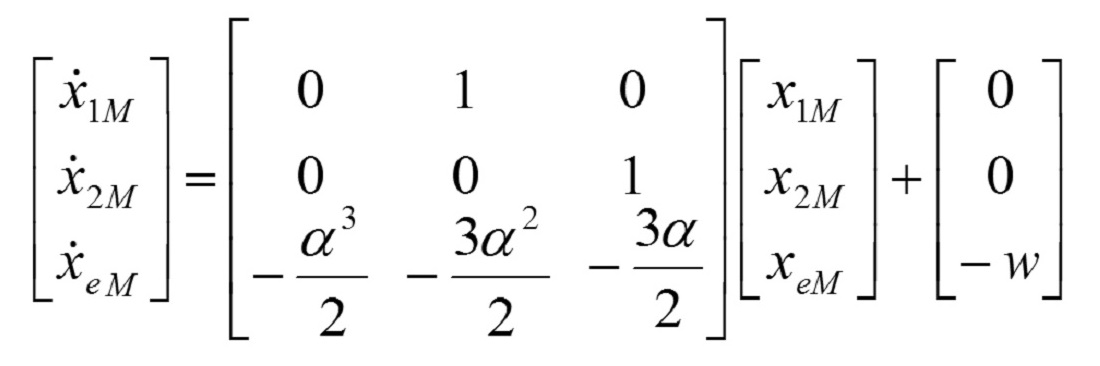
Z hľadiska regulácie ťahu môžeme uvažovať o systéme 2. rádu. Prvá stavová veličina bude ťah (F = x1) a za druhú stavovú veličinu zvolíme rozdiel obvodových rýchlostí valcov (dv = x2 = v2 – v1), pričom rýchlosť v2 chápeme ako ďalšiu poruchu. Stavový popis strednej časti KL z hľadiska ťahu podľa obr. 1 môžeme uvažovať v tvare:
 |
| (1) |
Regulácia ťahu strednej časti kontinuálnej linky
Požadované dynamické vlastnosti KL predpíšeme referenčným modelom 2. rádu. Aby sme dostali pre sústavu 2. rádu dodatočnú informáciu o neznámych parametrických aj aditívnych poruchách, rozšírime jej referenčný model o jednu stavovú veličinu x3M = xeM (teda na referenčný model 3. rádu), ktorá bude zabezpečovať, aby v ustálenom stave bola regulačná odchýlka ťahu nulová.
 |
| (2) |
Referenčný model bude lineárny systém 3. rádu, ktorého dynamika je nastaviteľná jediným voliteľným kladným parametrom α. Stavový popis referenčného modelu je zobrazený pod týmto textom a jeho bloková schéma je uvedená nižšie na obr. 2.
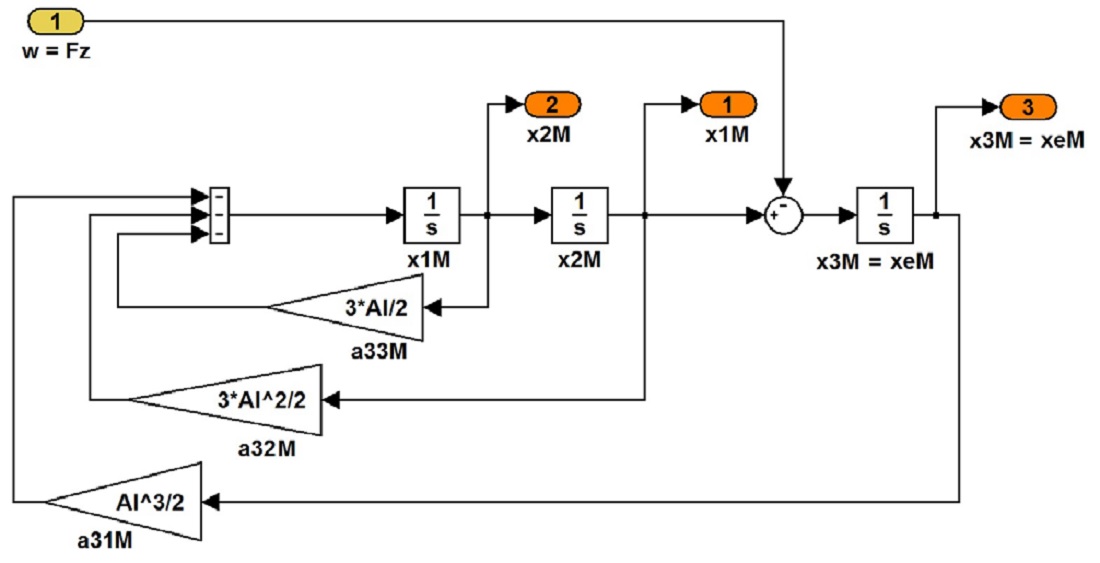 |
| Obr. 2: Rozšírený referenčný model pre reguláciu ťahu |
Z obr. 2 je zrejmé, že v ustálenom stave bude vstup integrátora x3M rovný nule a ťah sa bude rovnať žiadanej hodnote w. Ďalej predpokladajme, že regulovaná sústava 2. rádu bude rozšírená o integrátor výstupnej veličiny. Jej stavový popis bude v tvare:
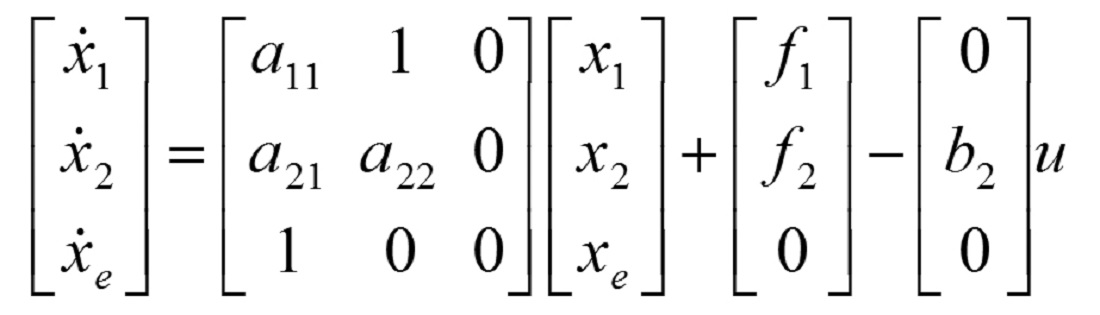 |
| Stavový popis regulovanej sústavy (3) |
Ak zavedieme odchýlku referenčného modelu a sústavy v tvare:
 |
| (4) |
Vieme jednoduchými úpravami dostať nasledujúci tvar:
 |
| (5) |
V tejto formulácii je f zovšeobecnený poruchový vektor, ktorý zahŕňa všetky parametrické aj aditívne poruchy pôsobiace na sústavu vzhľadom k jej referenčnému modelu. Ak zvolíme Ljapunovovu funkciu pre systém (5) v tvare:
 |
| (6) |
Následne dokážeme vyvodiť z definície premennú P = pozitívne „definitnú" maticu, ktorú môžeme zapísať v zmysle:
 |
| Pozitívne „definitná" matica - premenná P (7) |
V ďalšom kroku po úprave môžeme pozorovať, že derivácia z Ljapunovovej funkcie (6) pri voľbe Q = -α P má tvar:
| (8) |
Systém (5) bude asymptoticky stabilný, ak pre vstup u bude platiť
 |
| (9) |
Pre tvorbu odchýlok stavových veličín referenčného modelu a sústavy podľa rovnice (4) môžeme použiť nasledujúcu úpravu:
| (10) |
Na záver je celková bloková schéma regulácie ťahu KL zobrazená na obr. 3.
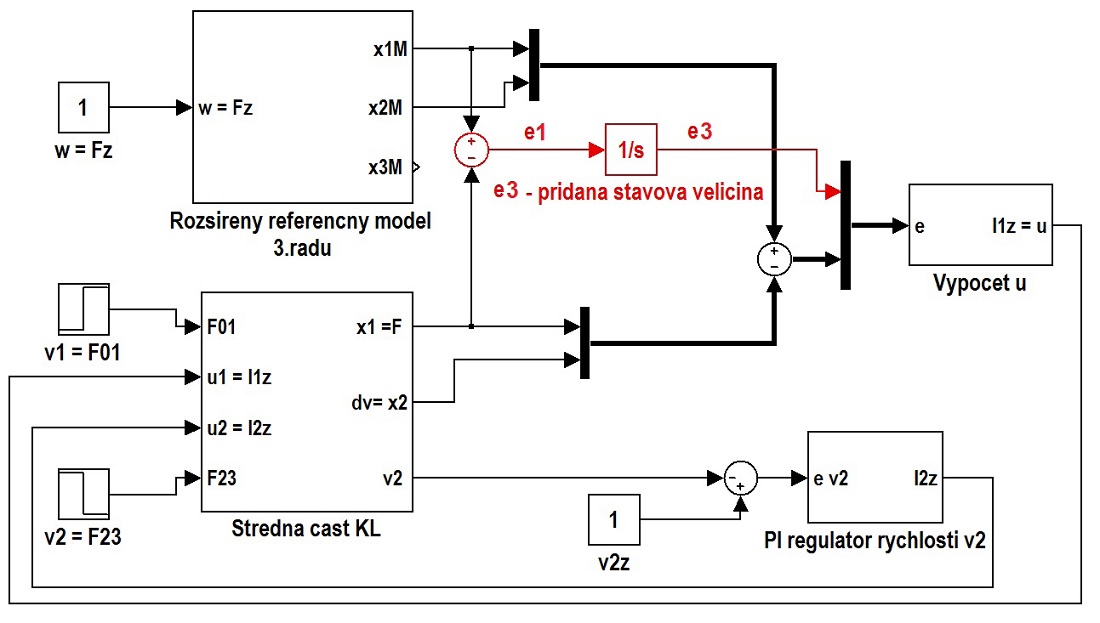 |
| Obr. 3: Bloková schéma regulácie ťahu KL |
Ako ukazuje obr. 4, ťah kontinuálnej linky prakticky sleduje ťah predpísaný referenčným modelom, a to aj pri pôsobení skokových porúch na jej vstupe a výstupe. Robustnosť navrhnutej regulácie je ukázaná na obr. 5 pre zmenu spracovávaného materiálu za päťnásobne pružnejší a pre dvojnásobné zväčšenie momentu zotrvačnosti na valcoch, napr. ťahaním podstatne hrubšieho plechu. Ako je vidieť z tohto obrázka, priebehy výstupných veličín sa počas regulácie prakticky nezmenili.
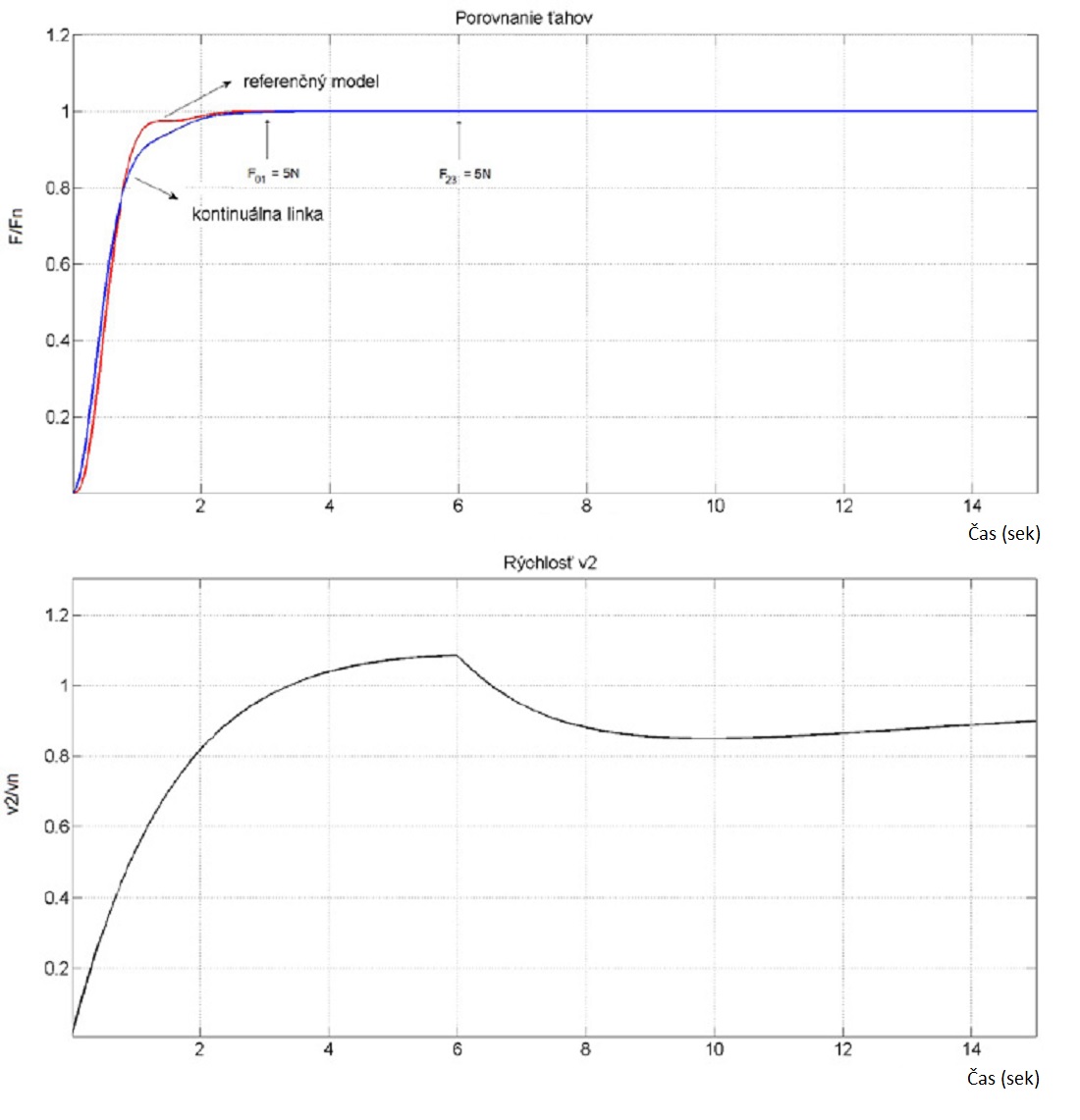 |
| Obr. 4: Priebehy ťahu a rýchlosti strednej časti KL pri Kt=0.2*KtN a J=2*JN |
Záver
Predložený článok sa zaoberá návrhom a verifikáciou novej stabilnej regulačnej štruktúry na reguláciu ťahu strednej časti kontinuálnej linky. Základná myšlienka spočíva vo vytvorení prídavnej informácie (novej vhodnej stavovej veličiny), ktorá umožní dosahovať nulovú regulačnú odchýlku v ustálenom stave. Regulátor je potom navrhnutý tak, aby zabezpečil asymptotickú stabilitu rozšíreného systému, a tým automaticky aj nulovú regulačnú odchýlku. Navrhnutá štruktúra (ako vyplýva z predpokladov pri jej návrhu) zabezpečí kvalitnú dynamiku regulácie, pričom je silne robustná a vhodná aj pre nelineárne systémy.
TEXT/FOTO:
PROF. ING. DANIELA PERDUKOVÁ, PH. D., PROF. ING. PAVOL FEDOR, PH. D., TECHNICKÁ UNIVERZITA V KOŠICIACH, FAKULTA ELEKTROTECHNIKY A INFORMATIKY, KATEDRA ELEKTROTECHNIKY A MECHATRONIKY
Použitá literatúra
[1] Jeon, S. H., Kim, J. M., Jung, K. C., SUI, S. K., Choi, J. Y.: Decoupling control of bridle rolls for steel mil drive system, IEEE Trans. Industry Application, vol. 35, n.1, 1999, pp 119 – 125
[2] Wolfermann, W., Schroeder, D.: Application of decoupling and state space control in processing machines with continuous moving webs. In: Proc. IFAC, 1987, pp 100 – 105
[3] Song, Seung-Ho, SUL, Seung-Ki: A New Tension Controller for Continuous Strip Processing Line. IEEE Transactions on industry applications, Vol. 36, No. 2, 2000, pp 633 – 639
[4] Bebič, M., Jeftenič, B., Belinčevič, M.: Electric drives for paper machines, in Serbian, Ee‘2001, Novi Sad, Nov. 2001
[5] Sassano M., Astolfi, A.: Dynamic Lyapunov functions, Automatica, Vol.49, No.4, 2013, pp. 1 056 – 1 067
[6] Furasov, V. D.: Ustojčivosť dviženija, ocenki i stabilizacija. Moskva: Nauka, 1977