 V článku je analyzované semiaktívne pruženie, riadené adaptívnym regulátorom. Riadenie je zamerané výhradne na adaptáciu kritéria pruženia vozidla počas jazdy. Cieľom je dosiahnuť požadovaný komfort jazdy pri dobrej jazdnej dynamike vozidla. S úlohou sa spája i modelovanie vozidla a jednotlivých komponentov systému pruženia.
V článku je analyzované semiaktívne pruženie, riadené adaptívnym regulátorom. Riadenie je zamerané výhradne na adaptáciu kritéria pruženia vozidla počas jazdy. Cieľom je dosiahnuť požadovaný komfort jazdy pri dobrej jazdnej dynamike vozidla. S úlohou sa spája i modelovanie vozidla a jednotlivých komponentov systému pruženia.
Klasické pasívne pruženie sa najčastejšie volí ako kompromis medzi požiadavkou na komfort a bezpečnosť jazdy. Intenzívny vývoj aktívnych a semiaktívnych systémov pruženia automobilov je motivovaný snahou o súčasné zabezpečenie obidvoch protichodných požiadaviek [1].
Z hľadiska stratégie riadenia je v praxi zatiaľ najpoužívanejšia tzv. Skyhook logika, ktorá prednostne slúži na zabezpečenie lepšieho komfortu počas jazdy. V tomto článku je analyzovaný návrh adaptívneho riadenia, ktorého podstata je zameraná výhradne na adaptáciu kritérií pruženia. S návrhom je spojená identifikácia tlmenia lineárneho Skyhook tlmiča a tlmenia tlmičov pruženia, ich odladenie na extrémne hodnoty pre prípady, keď automobil dosahuje najvyšší jazdný komfort, najlepšiu jazdnú dynamiku a z konštrukčného hľadiska najbezpečnejšiu spoľahlivosť pruženia.
Pomocou návrhu vhodných adaptívnych funkcií je potrebné sa medzi týmito extrémnymi hodnotami pohybovať tak, aby vzhľadom na aktuálne jazdné podmienky bol súčasne zabezpečený komfort a dobrá jazdná dynamika. Dosiahnuté výsledky navrhovaného adaptívneho riadenia sú konfrontované s pružením odladeným na maximálny komfort (mäkké pruženie) a maximálny šport (tvrdé pruženie).
Simulačný model automobilu
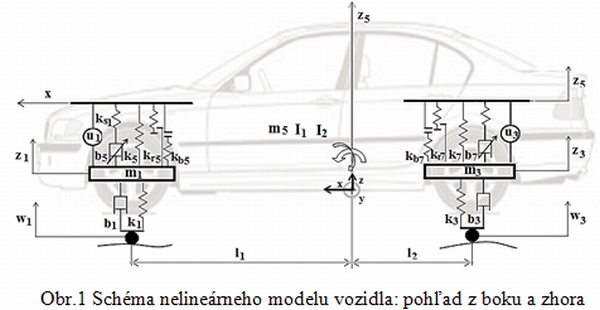
Na analýzu dynamických vlastností systému pruženia bol použitý nelineárny model automobilu (obr. 1), v ktorom boli zakomponované nelineárne semiaktívne tlmiče, meniaca sa tuhosť pruženia vzhľadom na veľkosť jeho stlačenia, odskakovanie pneumatiky od vozovky, stabilizátory, ako aj vplyv kinematiky zavesenia kolies.
Pre simuláciu vlastností pruženia a syntézu regulátora je vhodné model vyjadriť v stavovom priestore a následne vykonať niekoľko úprav. Vo vstupnom vektore stochastického budenia by mali vystupovať iba rýchlosti nerovnosti vozovky a výchylky vozovky budú potom presunuté do stavového vektora systému. Ďalším krokom je transformácia systému z absolútnych súradníc do relatívnych súradníc, kde výchylky sú relatívne voči výchylkám vozovky, čím sa dosiahne riaditeľnosť a pozorovateľnosť systému.
Uvažovaný model je v nasledujúcom tvare:
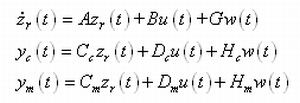
kde zr je stavový vektor, yc je výstupný vektor riadených veličín modelu (optimalizované kritéria vozidla) a ym je vektor meraných veličín [2]. Vektor w je vektor budenia od vozovky (hydropulz). Klasický stavový model je v našom prípade rozšírený o matice G a H, pričom matica G je maticou vstupných stochastických veličín a matica H predstavuje maticu prevodu stochastických veličín na výstup.
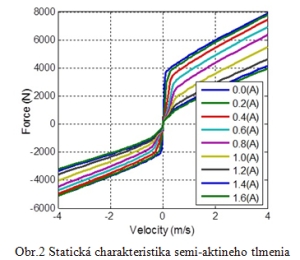
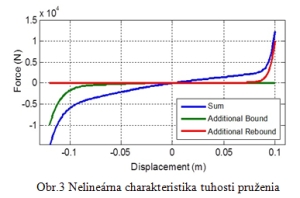
V programe Simulik je model rozšírený o nelineárne komponenty a zakomponovali sme aj vplyv kinematického zavesenia kolesa na pruženie. Charakteristiku semiaktivneho tlmenia môžeme vidieť na obrázku 2. Nelineárnu charakteristiku tuhosti pruženia rozšírenú o prídavne pružiny na obrázku 3.
 |
 |
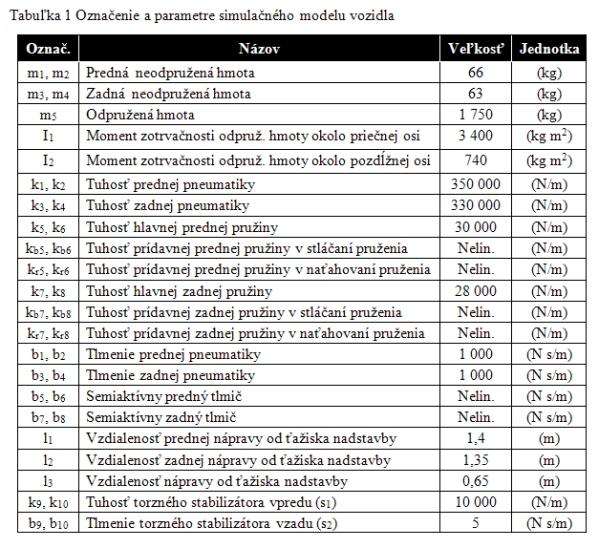
V tabuľke 1 sú uvedené označenia a hodnoty jednotlivých parametrov simulačného modelu.
Návrh adaptívneho riadenia
Pre syntézu adaptívneho riadenia je potrebné nájsť také hodnoty lineárneho tlmenia tlmičov, pri ktorých automobil počas jazdy dosahuje v jednom prípade maximálny jazdný komfort, v druhom prípade maximálne šport a maximálnu konštrukčnú spoľahlivosť pruženia. Pri identifikácii tlmenia karosérie je použitá Skyhook logika, ktorej princíp spočíva v uvažovaní fiktívneho tlmiča medzi pevným bodom v priestore a karosériou vozidla [3].
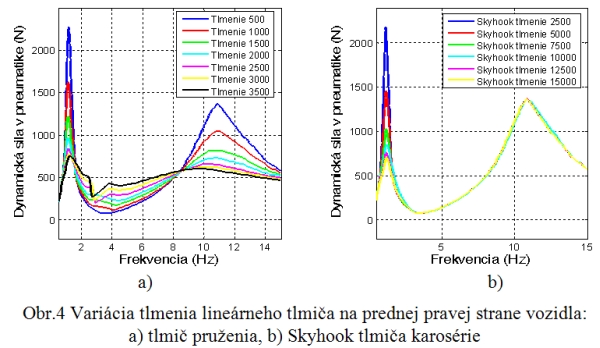
Variáciou niekoľkých konštánt Skyhook tlmenia karosérie a pruženia identifikujeme hľadané konštanty tlmenia, ktoré zabezpečujú v čo najväčšej miere splnenie kritérií pruženia (komfort, bezpečnosť a spoľahlivosť). Na obrázku 4 je ukážka variácie koeficientov tlmenia tlmičov pruženia a Skyhook tlmiča karosérie vo frekvenčnej oblasti a vplyv zmeny tlmenia pri určovaní bezpečnosti jazdy. Simuláciou variácii meniacej sa veľkosti tlmenia pruženia a karosérie vzhľadom na všetky optimalizované kritériá pruženia sme dokázali identifikovať hľadané konštanty tlmenia, ktoré použijeme pri syntéze navrhovaného adaptívneho regulátora.
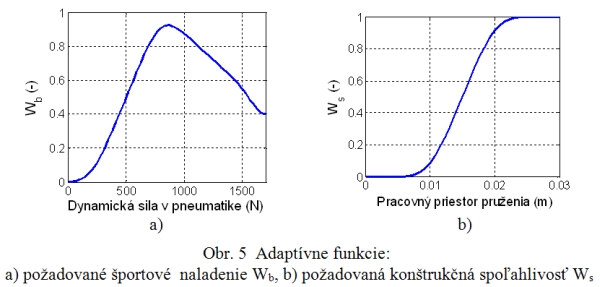
Ďalším krokom pri návrhu adaptívneho riadenia je nájdenie adaptívnych funkcií, pomocou ktorých sa medzi kritickými hodnotami kritérií pruženia dokážeme pohybovať tak, aby bol súčasne zabezpečený komfort i jazdná dynamika. Hodnota požadovaného komfortu Wk je 1, funkcia požadovaného športu Wb môže nadobúdať hodnoty od 0 po 1, v závislosti od dynamickej sily v pneumatike (obr. 5 a). To isté platí pre funkciu požadovanej spoľahlivosti Ws vzhľadom na veľkosť pracovného priestoru pruženia (relatívna výchylka medzi odpruženou a neodpruženou hmotou – obr. 5 b).
Pomocou nasledujúcej rovnice získame hodnotu adaptívneho tlmenia pruženia:
![]()
kde bk je tlmenie pruženia pre maximálne komfortné naladenie, bb maximálne športové naladenie vozidla a bs je tlmenie pre získanie maximálnej spoľahlivosti pruženia.
Pre výsledný silový účinok semiaktívneho tlmiča na konkrétnej náprave a strane vozidla platí:
![]()
Výsledky simulácií riadenia
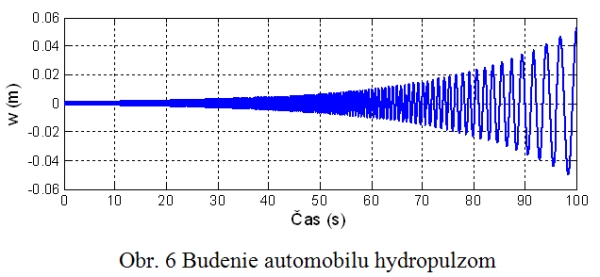
Pre simuláciu kmitania je vozidlo budené prostredníctvom hydropulzu, ktorého počiatočná frekvencia je 4 Hz a koncová 20 Hz (obr. 6). Prejazdová rýchlosť vozidla je konštantná – 80 km/h.
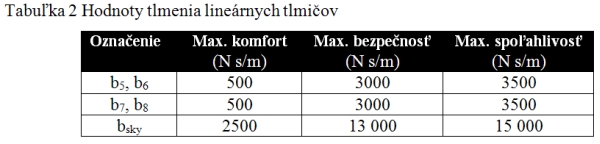
Na základe výsledkov zo simulácií variácií tlmenia, sú v tabuľke 2 uvedené kritické hodnoty tlmenia vzhľadom na kritériá.
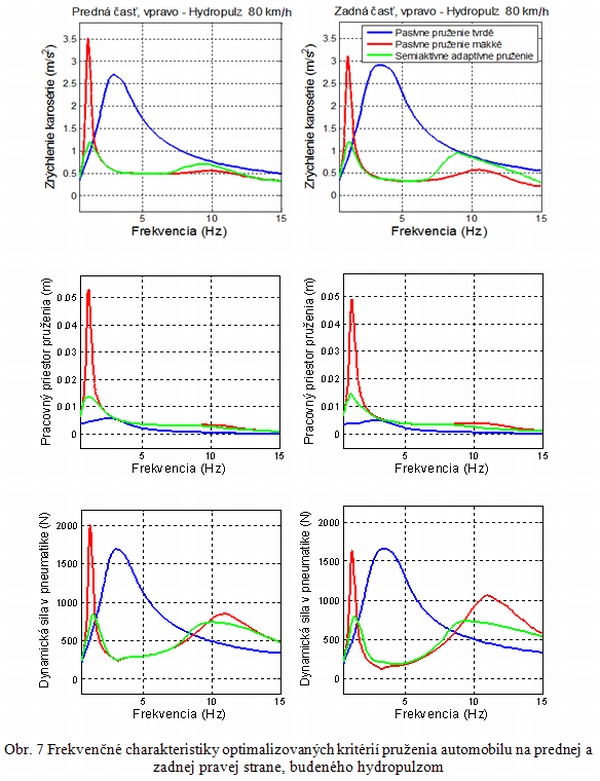
Na nasledujúcom obrázku 7 sú vo frekvenčnej oblasti zobrazené výsledné simulácie optimalizovaných kritérií pruženia na pravej strane prednej a zadnej nápravy vozidla, kde semiaktívne adaptívne riadené pruženie je porovnané s pasívnym mäkkým a tvrdým pružením.
Záver
Z uvedených výsledkov numerických simulácií pruženia automobilu je vidieť, že navrhovaná syntéza adaptívneho riadenia prináša zaujímavé výsledky, ktoré sú v súlade so stanovenými kritériami. Adaptácia bola zameraná na dosahovanie požadovaných kritérií pruženia. Semiaktívnym adaptívnym riadením pruženia automobil dosahuje požadovaný jazdný komfort (zrýchlenie karosérie), ktorý je na úrovni pasívneho mäkkého pruženia, čo možno sledovať v oblasti 4 – 8 Hz, kde je ľudské telo najcitlivejšie na vibrácie. Súčasne je zabezpečená požadovaná bezpečnosť pri jazde (dynamická sila), zníženým veľkosti dynamickej sily v pneumatike v oblasti 8 – 12 Hz. Z výsledkov vidieť, že pri adaptívnom riadení je splnená i podmienka zabezpečiť spoľahlivosť pruženia (pracovný priestor pruženia), vyplývajúceho z jeho konštrukčného vyhotovenia.
Poďakovanie
Článok bol pripravený pri grantovej podpore projektu APVV-0090-10.
Literatúra:
[1] Guglielmino, Emanuele: Semi-active Suspension Control. Berlin: Springer, 2008.
302 pgs., ISBN 1-84800-230-2
[2] Zuščík, Marián: Návrh semiaktívneho odpruženia, Dizertačná práca. Bratislava: Slovenská technická univerzita v Bratislave, Strojnícka fakulta, Ústav aplikovanej mechaniky a mechatroniky, 2010.
[3] Rajamani, Rajesh: Vehicle Dynamics and Control. Troy: Rensselaer Polytechnic Institute, 2006. 485 pgs., ISBN 0-387-26396-9
TEXT Monika Zuščíková, Milan Lokšík, Cyril Belavý FOTO archív redakcie