Gravitačné zrýchlenia, zvlášť súvisiace s výrobnou technikou, sú väčšinou nežiaduce a na ich presné definovanie, analyzovanie a optimalizovanie treba určiť ich parametre. Na to sa používajú rôzne meracie systémy, či už jednoduché alebo komplikovanejšie. V praxi sa často stretávame s takým typom gravitačného zrýchlenia, ktorý má za následok rozkmitanie predmetu takým spôsobom, že sa stáva nestabilným a vysoko nebezpečným pre svoje okolie (napríklad vŕtanie do nesprávne uchyteného materiálu).
Gravitačné zrýchlenia, zvlášť súvisiace s výrobnou technikou, sú väčšinou nežiaduce a na ich presné definovanie, analyzovanie a optimalizovanie treba určiť ich parametre. Na to sa používajú rôzne meracie systémy, či už jednoduché alebo komplikovanejšie. V praxi sa často stretávame s takým typom gravitačného zrýchlenia, ktorý má za následok rozkmitanie predmetu takým spôsobom, že sa stáva nestabilným a vysoko nebezpečným pre svoje okolie (napríklad vŕtanie do nesprávne uchyteného materiálu).
Takto rozkmitaný predmet sa rozkmitáva vo všetkých troch osiach a dokonca sa môže okolo týchto osí otáčať, čím sa buď poškodí, alebo poškodí predmety vo svojej blízkosti. Na odmeranie opísaného typu správania sa predmetu (materiálu, obrobku) potrebujeme taký merací systém, ktorý dokáže odmerať gravitačné zrýchlenie vo všetkých troch osiach trojrozmerného súradnicového systému. Môže to byť aj inerciálny merací systém.
Inerciálny merací systém je systém založený na nepretržitom vyhodnocovaní polohy objektu. Využíva senzory citlivé na pohyb, v našom prípade akcelerometre, ktoré sú považované za primárne inerciálne senzory umiestnené na objekte.
Príspevok sa zaoberá návrhom meracieho systému, ktorý je využiteľný v technológii obrábania na meranie gravitačného zrýchlenia obrábaného materiálu. Ako primárny snímač danej fyzikálnej veličiny bol implementovaný akcelerometer LIS3LV02D, ktorý spolupracoval s procesorom MSP430 (Soták, 2009). Úlohou procesora je vyhodnocovanie nameraných údajov a komunikácia s PC. Softvérové riešenie pozostávalo z programu pre procesor MSP430, ktorý bol súčasťou hardvéru a PC aplikácie, ktorá bola vytvorená a pomocou ktorej sa namerané údaje spracovávali a vyhodnocovali. Správnosť vytvoreného systému bola overená testovaním.
Akcelerometer LIS3LV02D
LIS3LV02DQ je priestorový akcelerometer s digitálnym výstupom. Akcelerometer obsahuje senzor (citlivú časť) i kompletnú elektroniku, pomocou ktorej zbiera informácie z okolitého sveta. Je vyrobený systémom MEMS technológií pomocou pružných silikónových štruktúr. Tie sú pevne spojené s podložkou v kotvách a umožňujú pohyb v rovine paralelnej so substrátom. Citlivá časť je umiestnená na hornej časti senzora preto, aby sa zabránilo zablokovaniu pohyblivého mechanizmu počas zapuzdrovania. Digitálny výstup zo senzora je voliteľný I2C (Inter Integrsted Circuit Bus) alebo SPI (Serial Peripheral Interface). Elektronika spracúvajúca informácie zo senzora je zhotovená CMOS-ovou (Complementary Metal – Oxid Semiconductor) technológiou. Týmto spôsobom je zaručená kompatibilita oboch častí (mechanickej i elektrickej) (Husák, 2010). Vyhodnocovacia elektronika je v procese výroby nastavená presne na mechanické vlastnosti snímača. Akcelerometer LIS3LV02DQ umožňuje softvérové nastavenie voľby rozsahu ± 2 g alebo ± 6 g. Podobne ako voľbu rozsahu možno zvoliť aj nastavenie rozsahu snímaných frekvencií až do 2 540 Hz. Self test obvodu umožňuje zabezpečiť 100-percentnú funkčnosť systému. Akcelerometer obsahuje obvody na generovanie prerušenia, indikujúce napríklad voľný pád, alebo sa dá nastaviť, ak zrýchlenie v niektorej osi (napr. želanej) prekročí nastavenú hodnotu. Všetky nastavenia senzora sa uskutočňujú zapisovaním do príslušného registra akcelerometra. Senzor sa dodáva v plastovom puzdre QFPN 28 a rozsah pracovných teplôt je – 40 °C až + 85 °C.
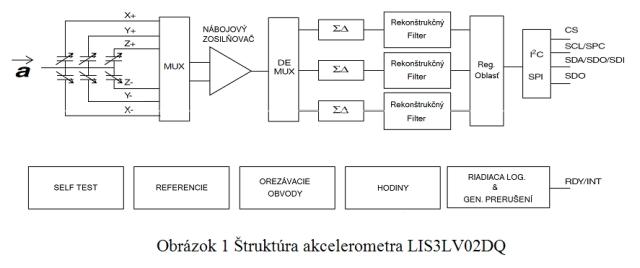
Na obrázku 1 je zobrazený proces snímania zrýchlenia. Citlivú časť tvoria kapacitné polomosty – každý pár pre jednu os. Fyzickým usporiadaním je definovaný systém pre danú os. Zrýchlenie pôsobiace na senzor zapríčiní vychýlenie senzorickej časti z kľudovej polohy a následne nastáva rozladenie kapacitného polomosta. Toto rozladenie je prostredníctvom multiplexora privádzané na nábojový zosilňovač. Ten prevádza napäťové impulzy z meracieho kondenzátora pomocou nábojovej integrácie na užitočný signál. Hodnota kondenzátora je v pokojovom stave niekoľko pF, pri zrýchlení jeho zmena dosahuje maximálne do 100 pF. Zosilňovače používané v meracom reťazci sú nízkošumové, aby svojou činnosťou neovplyvňovali hodnotu napäťového signálu, ktorý je nositeľom informácie o zrýchlení a postupuje ďalej k ΣΔ prevodníku, ktorý je spätý s rekonštrukčným filtrom. Rekonštrukčné filtre odstraňujú vysoké frekvencie ktoré vznikajú pri kvantovaní. Rozsah údajov na výstupe je závislý od voľby „decimation faktora“, ktorý si nastavuje používateľ a pohybuje sa od 40 Hz po 2 520 Hz. POužívateľ pristupuje k meraným údajom a k nastavovacím registrom prostredníctvom digitálnej komunikácie rozhraním I2C alebo SPI.

Procesor MSP430
Úlohou Procesora MSP430 (obr. 3.) je vyhodnocovať a odosielať namerané údaje do PC. Zahŕňa 16-bitovú RISC (Reducet Instruction Set Computer) architektúru, periférne obvody a flexibilné systémové hodiny. Používa Von Neumanovu štruktúru pamäti, čiže má oddelenú dátovú časť pamäte od pamäte programu (Hubálek & Adámek, 2010). Združuje modem s modulárnou pamäťou. Vyznačuje sa týmito vlastnosťami:
1. Nízky príkon, vhodný pre aplikácie napájané batériami,
0,1 μA pre udržanie RAM,
0,8 μA real-time hodiny,
250 μA / MIPS spotreba.
2. 16-bitová RISC architektúra, ponúka pre aplikácie rovnaký výkon pri menšom kóde
kompaktné jadro redukuje spotrebu energie, a teda i cenu,
je optimalizovaný pre programovanie vo vyššej úrovni,
len 27 inštrukcií a sedem adresných módov,
rozsiahle vektorové prerušenia.

PC aplikácia
Na meranie gravitačného zrýchlenia pri vŕtaní bola vytvorená PC aplikácia v programovacom jazyku C++, v programovacom prostredí C++ Builder 6 doplnená o komponent AsyncPro pre sériovú komunikáciu. Výstupom aplikácie je číselný výstup nameraných hodnôt a grafický priebeh meraných hodnôt. Ďalej sa skladá z dvoch okien (obr. 4 a 5). Okno ,,Form1“ predstavuje hlavné okno - aplikácia a Okno ,,Form2“ predstavuje okno pre nastavenie portov. Číselné hodnoty sa zapisujú do komponentu ,,RichEdit“ a grafický výstup je reprezentovaný komponentom ,,Image“, do ktorého sa vykresľuje grafický priebeh merania. Na nastavenie parametrov portu sa použije tlačidlo ,,COM PORT“, ktoré vyvolá otvorenie okna ,,Form2“ pre nastavenie parametrov. Na vyselektovanie portu sa použije tlačidlo ,,Select port“ a zároveň aplikácia začne prímať údaje od snímača a komponent „Label7“ vypíše ,,otvorený“. V tomto stave aplikácia zapisuje údaje zo snímača do komponentu ,,RichEdit“, graficky vykresľuje aktuálny priebeh merania do komponentu ,,Image“ a zapisuje aktuálnu hodnotu zrýchlenia do ,,Label1“, ,,Label2“, ,,Label3“. Ukončenie merania sa vykoná po stlačení tlačidla ,,Zatv. Port“ ktoré zatvorí port a tak sa meranie preruší.
 |
 |
Testovanie meracieho systému
Testovanie pozostáva z experimentu, ktorý má overiť približnú presnosť meracieho systému a zmerať rozdiel v gravitačnom zrýchlení obrábaného materiálu pri vŕtaní s ostrým a opotrebeným vrtákom.
1. Meranie bolo realizované na nasledujúcom HW vybavení:
2. vŕtačka NAREX EV 13 F-H3,
3. stojan na vŕtačku NAREX profi,
4. vrták do kovu Ø 6 mm,
5. obrábaný materiál,
6. závažie s hmotnosťou 4 kg,
7. svorky na uchytenie akcelerometra,
8. svorka na uchytenie stojana na pracovný stôl,
9. akcelerometer LIS3LV02DQ s procesorom MSP430,
10. napájací zdroj el. napätia 12 V,
11. PC s novou, originálnou aplikáciou.
Experiment pozostáva z vŕtania do skúšobnej vzorky 100 x 20 x 4 mm z materiálu konštrukčnej nelegovanej ocele triedy 10 novým vrtákom do kovu s priemerom 6 mm. Uskutočnilo sa desať po sebe nasledujúcich vŕtaní tým istým vrtákom do jedného obrobku. Následne sa urobilo 50 vŕtaní bez merania, čím sme dosiahli opotrebenie vrtáka. Z prvých desať meraných vŕtaní bol urobený aritmetický priemer a vykreslený graf. Posledných 10 meraní sa uskutočnilo po spomenutom opotrebení vrtáku. Úlohou bolo porovnať a vyhodnotiť graf aritmetického priemeru s ostrým vrtákom a graf nameraných hodnôt s opotrebeným vrtákom.
 |
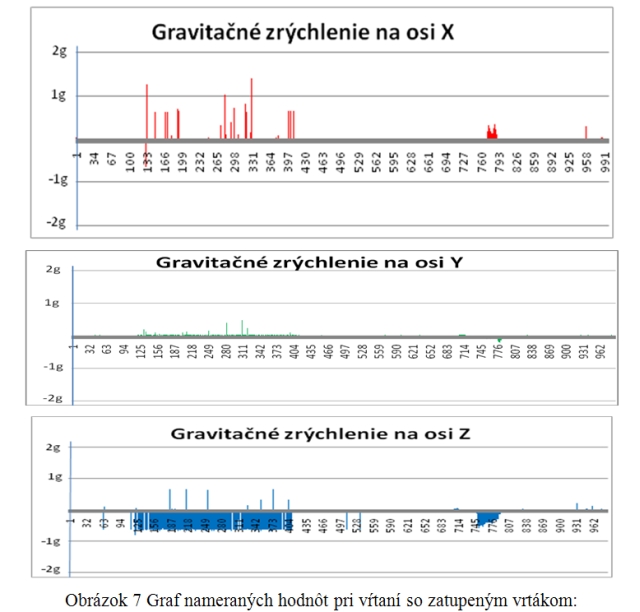 |
Z výsledných grafických priebehov je zrejmé, že hodnoty gravitačného zrýchlenia v oboch grafoch sa mierne líšia, čo by malo byť spôsobené opotrebením vrtáku. Z merania vyplýva, že pri opotrebenom vrtáku (obr. 7) sú hodnoty gravitačného zrýchlenia obrábaného materiálu v celom rozsahu merania menšie ako pri novom vrtáku (obr. 6).
Záver
Merací systém ako celok je funkčný. Namerané výsledky sú vzhľadom na podmienky merania uspokojivé. Jeho uplatnenie je všestranné, či už pri meraní gravitačného zrýchlenia obrábaného materiálu pri vŕtaní, ako to bolo v tomto prípade, alebo v mnohých iných oblastiach, kde treba merať gravitačné zrýchlenie. K flexibilite celého systému prispieva aj fakt, že PC aplikáciu sme vytvorili tak, aby používateľ mohol s nameranými hodnotami pracovať podľa vlastnej požiadavky.
Cieľom úlohy bolo vytvoriť merací systém, využiteľný v technológii obrábania na meranie gravitačného zrýchlenia obrábaného materiálu. Tento systém je zložený z hardvérovej a softvérovej časti. Hardvér sa skladá z procesora MSP430 a akcelerometra LIS3LV02DQ. Softvérová časť obsahuje PC aplikáciu vytvorenú v prostredí C++ Builder 6, ktorá poskytuje grafický a číselný výstup nameraných hodnôt. Takto vytvorený merací systém bol následne testovaný. Cieľom testovania bolo overiť správnu funkciu celého systému a rozdiel v gravitačnom zrýchlení pri vŕtaní s novým a opotrebeným vrtákom.
Literatúra
SOTÁK, M.: 2009. Inerciálny navigačný systém v simulinku. Akadémia ozbrojených síl gen. M. R. Štefánika [online]. 2009. [cit 2011-03-29] Dostupné na internete: http://dsp.vscht.cz/konference_matlab/MATLAB09/prispevky/093_sotak.pdf. >
HUSÁK, M.: 2010. Akcelerometre. ČVUT FEL Praha [online]. 2010. [cit 2010-10-17] Dostupné na internete: http://www.micro.feld.cvut.cz/home/X34SES/prednasky/08%20Akcelerometry.pdf. >
HUBÁLEK, J., ADÁMEK, M.: 2010. Mikrosenzory a mikroelektromechanické systémy. VUT Brno [online]. 2010. [cit 2010-10-26] Dostupné na internete: http://web.umel.feec.vutbr.cz/BMMS/scripta.pdf. >
TEXT: Andrej Abramov, Pavol Božek