PROBLEMATIKA MECHANICKÝCH SÚSTAV
Problémom pri zložitých mechanických sústavách môže byť zostavenie spomínaného matematického modelu, preto je možné pohyb sústavy riešiť aj s využitím programov riešiacich dynamiku sústav na virtuálnych dynamických modeloch. Medzi tieto programy patrí napríklad MSC. ADAMS. Článok rieši využitie a porovnanie dvoch riešení regulácie polohy fyzikálneho kyvadla.
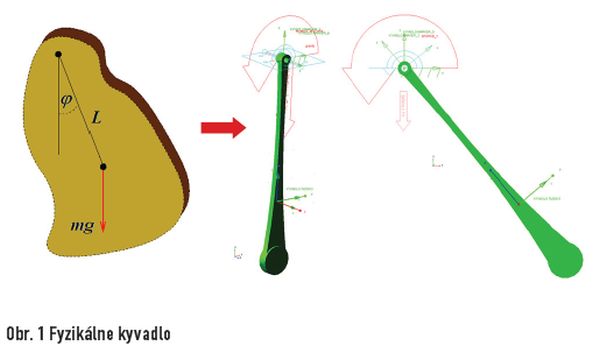
Fyzikálne kyvadlo predstavuje teleso spojené s nepohyblivým rámom rotačnou väzbou v bode, ktorý nie je totožný s jeho ťažiskom (obr. 1). Toto spojenie ponechá kyvadlu len jeden stupeň voľnosti, a to rotáciu okolo jednej osi v mieste väzby. Po vychýlení kyvadla z rovnovážnej polohy o určitý uhol začne kyvadlo voľne kmitať vplyvom svojej tiaže. Ak zanedbáme pasívne odpory (trenie vo väzbe, odpor vzduchu a pod.), bude amplitúda výchylky konštantná, rovná uhlu počiatočného natočenia kyvadla.
MATEMATICKÝ MODEL KYVADLA
Pohybová rovnica popisujúca voľné kmitanie kyvadla sa dá vyjadriť z teórie dynamiky tuhých telies, napríklad princípom virtuálnych prác, Lagrangeovými rovnicami II. druhu a pod. Pohybová rovnica predstavuje matematický model kyvadla a pre kyvadlo, na ktoré pôsobí iba vlastná tiaž. má tvar:
![]()
kde I je moment zotrvačnosti k osi rotácie kyvadla, m je hmotnosť kyvadla, L je vzdialenosť ťažiska od osi rotácie, g je gravitačné zrýchlenie, ϕ je uhol natočenia kyvadla a ϕ je uhlové zrýchlenie kyvadla.
Ak je kyvadlo poháňané hnacím rotačným pohonom v osi väzby, v pohybovej rovnici pribudne na pravej strane pôsobiaci krútiaci moment M:
![]()
Na riešenie matematického modelu kyvadla konkrétneho tvaru je potrebné poznať hmotnosť, moment zotrvačnosti k osi rotácie a polohu ťažiska vzhľadom na os rotácie. Ak nie sú tieto údaje k dispozícii a poznáme len tvar a materiál kyvadla, je vhodné využiť ľubovoľný CAD program, v ktorom po vytvorení 3D geometrie kyvadla a zadaní hustoty materiálu, je možné určiť už spomínané fyzikálne vlastnosti kyvadla spolu so vzdialenosťou ťažiska od osi rotácie.
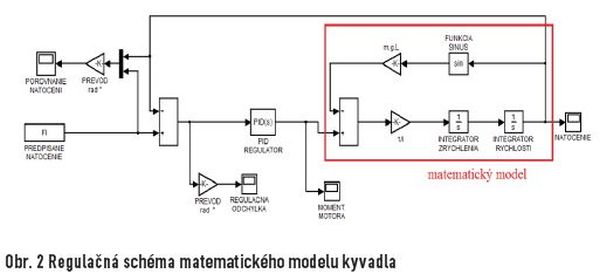
Riešenie matematického modelu je spracované v programe MATLAB/ Simulink, kde sa zostaví bloková schéma pohybovej rovnice. Hnací moment, ktorým sa má zabezpečiť žiadaná poloha kyvadla (obr. 4), bude regulovaný PID regulátorom. Nastavenie zložiek PID regulátora umožňuje v MATLAB/Simulink-u funkcia automatického nastavenia regulátora, alebo je potrebné tieto hodnoty zistiť pomocou niektorých metód z teórie riadenia. Bloková schéma regulácie matematického modelu kyvadla je znázornená na obr. 2.
VIRTUÁLNY DYNAMICKÝ MODEL KYVADLA
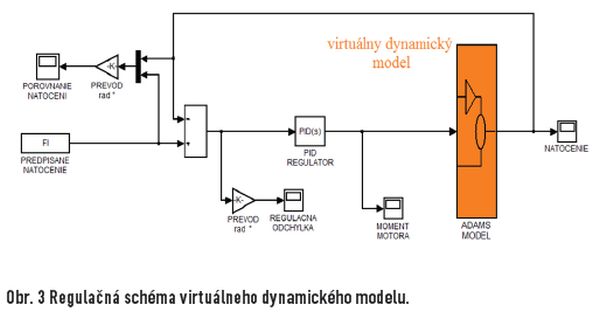
Virtuálny dynamický model je vytvorený v programe MSC.ADAMS/View, do ktorého sa importuje 3D geometria kyvadla z CAD programu a zadá sa príslušná hodnota hustoty materiálu kyvadla. Kyvadlo sa pomocou rotačnej väzby spojí s nepohyblivým priestorom a v mieste väzby sa vytvorí hnací moment. Pre potreby riadenie je nutné vytvorenie snímača natočenia kyvadla a premennej, ktorá bude funkciou hnacieho momentu motora. Všetky kroky sa vytvárajú pomocou grafických ikon v pracovnom prostredí programu. Takto pripravený model je možné následne exportovať do MATLAB/Simulink-u a zapojiť do regulačnej schémy, obr. 3.
VÝSLEDKY A ZHODNOTENIE
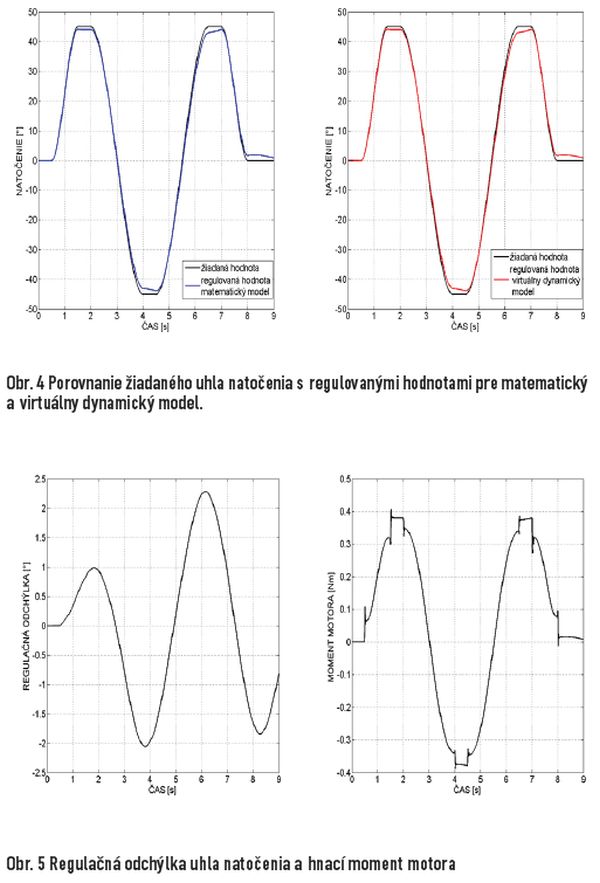
Pri regulácii matematického modelu sme využili možnosť automatického nastavenia PID regulátora. Rovnaké hodnoty regulátora sme použili aj pri regulácii virtuálneho dynamického modelu. Reguláciou oboch modelov sme dostali zhodné výsledky priebehu natočenia, ktoré sú znázornené na obr. 4. Regulovaný moment motora a regulačná odchýlka natočenia kyvadla od žiadanej hodnoty bola pri oboch simuláciách taktiež rovnaká, obr. 5.
ZÁVER
Totožné výsledky potvrdzujú, že využitím virtuálnych dynamických modelov, či už pri riešení dynamiky pohybu alebo jeho riadení, odpadá potreba zostavovania pohybových rovníc mechanických sústav. Takéto riešenie uľahčuje analýzu pohybu najmä pri sústavách zložených z viacerých telies, sústavách konajúcich priestorový pohyb, pri zohľadnení pružných vlastností hmoty, pasívnych odporov a pod.
O AUTOROCH:
Ing. Vladimír Goga, PhD. – Ústav elektroenergetiky a aplikovanej elektrotechniky, Fakulta elektrotechniky a informatiky v Bratislave, STU
Doc. Ing. Pavol Božek, CSc. – Ústav aplikovanej informatiky, automatizácie a matematiky, Materiálovo-technologická fakulta v Trnave, STU
LITERATÚRA
[1] Kuznetsov, A. P. Dombrachev, A. N. Reshetnikov, E. V.: (2006) Model for the formation of structural policies in mechanical production methods based on mathematical logic and set theory, automation and modern technology? 8 – M: “Publisher Engineering”
[2] Marchand P. & Holland T. (2003). Graphics and GUIs with MATLAB, Chapman & Hall/CRC, ISBN: 978-1584883203, USA
[3] Kňažík, Marek – Božek, Pavol: Simulácia v plánovaní a optimalizácii. In: Informatika a automatizácia v riadení procesov: VII. vedecká konferencia s medzinárodnou účasťou, Zvolen, 13. október 2011, Technická univerzita vo Zvolene, 2011, ISBN 978-80-228-2267-1. s. 155-164
[4] Ferrotec. Thermoelectric Technical Reference – Mathematical Modelling of TEC Modules [online]. Available on internet: http://www.ferrotec. com/technology/thermoelectric/thermalRef11/>
[5] Al-Akkad M. A. – AboulNour H.: (1996) “Design and Implementation of a developed bit-synchronizer for synchronous data communication and its computer simulation for testing and development purposes”, Engineering Sciences Journal – Damascus University, 1996, 12 v. – v. 2. Thesis Abstract, p. 178.
[6] Fominih, R. L. – Yakimovich, B. A.– Korshunov, A.: (2003) Automated subsystem of constructive-technological complexity, the complexity of manufacturing parts and organizational and technical level multinomenclature production. Information technology in product lifecycle management: St. Petersburg “SeverRoss”, pp. 100-102.
[7] Madáč, K. – Molnár, V. – Fedorko, G.: (2003) Fundamentals ProEngineer applications in technical pp. 77, ISBN 80-8073-013-X
TEXT ING. VLADIMÍR GOGA, PHD., DOC. ING. PAVOL BOŽEK, CSC., FOTO ARCHÍV REDAKCIE