 V súčasnosti sa kladú stále väčšie požiadavky na výkon, bezpečnosť, prevádzkovú spoľahlivosť a životnosť strojových zariadení. Preto stále rastie množstvo technických problémov, ktoré treba pri návrhu nových konštrukcií efektívne riešiť a tiež náročnosť výpočtov, ktoré je nevyhnutné vykonať [5].
V súčasnosti sa kladú stále väčšie požiadavky na výkon, bezpečnosť, prevádzkovú spoľahlivosť a životnosť strojových zariadení. Preto stále rastie množstvo technických problémov, ktoré treba pri návrhu nových konštrukcií efektívne riešiť a tiež náročnosť výpočtov, ktoré je nevyhnutné vykonať [5].
Na realizáciu návrhu a výpočtov je potom nevyhnutná vysoká úroveň vedomostí o mechanických vlastnostiach prvkov mechanických sústav, ako aj o fyzikálnych dejoch vznikajúcich počas prevádzky strojových zariadení.
V oblasti mechanických pohonov sa často stretávame napr. s problémami riadenia a regulácie, torzného kmitania [4], hlučnosti [3], vhodného výberu a nasledujúcej kontroly pevnosti a životnosti niektorého z prvkov mechanickej sústavy [7]. Na riešenie týchto problémov je nevyhnutné poznať mechanické parametre jednotlivých prvkov pohonu s dostatočnou presnosťou. Jedným zo základných mechanických parametrov rotačných strojov je hmotný moment zotrvačnosti rotora. Jeho hodnota býva uvedená v katalógu výrobcu daného stroja. Ale v niektorých prípadoch, keď výrobca túto hodnotu neuvádza alebo ide o starý typ zariadenia, treba hodnotu hmotného momentu zotrvačnosti zistiť samostatne.
* * * * *
Predstavuje jednoduchú metódu, ktorá nevyžaduje demontáž rotora ani špeciálne vybavenie. Je vhodná na zisťovanie hmotného momentu zotrvačnosti, ak nie je možné alebo vhodné demontovať rotor, alebo ak nemáme k dispozícii vhodné vybavenie na meranie motorových prúdov.
* * * * *
V literatúre z oblasti dynamiky a kmitania možno nájsť viacero metód na zisťovanie hmotného momentu zotrvačnosti [1-2]. Ale obvykle ide o metódy, kde je nevyhnutné demontovať rotor zariadenia. Tiež je možné merať hmotný moment zotrvačnosti momentu pri rozbehu alebo dobehu pomocou merania motorových prúdov [6], či už priamo alebo pomocou frekvenčného meniča so zabudovanou funkciou merania hmotného momentu zotrvačnosti. V tomto prípade je však nutné presne poznať vlastnosti elektrických častí motora, frekvenčný menič alebo iné špeciálne zariadenia na meranie elektrických veličín a časového priebehu otáčok.
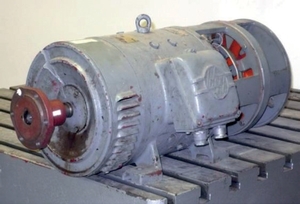
Elektromotor použitý na meranie hmotného momentu zotrvačnosti rotora
Navrhovaná metóda merania je prezentovaná na jednosmernom elektromotore typu SM 160 L (obr. 1). Tento motor sa v minulosti na našom pracovisku využíval ako súčasť laboratórnej mechanickej sústavy určenej na skúmanie torzného kmitania. V súčasnosti plánujeme jeho využitie ako učebnú pomôcku pri laboratórnych cvičeniach, na skúmanie odporov v ložiskách a testovanie metód na meranie hmotného momentu zotrvačnosti.
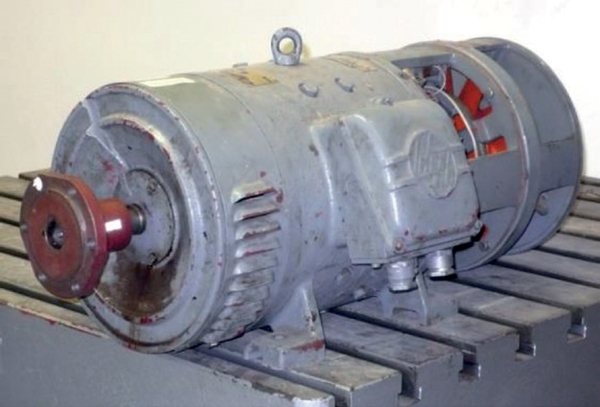 |
| Obr. 1: Jednosmerný elektromotor typu SM 160 L pripravený k meraniu |
Na účely merania hmotného momentu zotrvačnosti boli vymontované uhlíky pre minimalizáciu trenia. Osová výška motora od zeme bola približne 1,5 m, os hriadeľa bola nastavená do vodorovnej polohy. Na časový záznam merania bol využitý bežný kompaktný digitálny fotoaparát so záznamom VGA videa s frekvenciou 30 snímok za sekundu.
Meranie hmotného momentu zotrvačnosti metódou odvíjania závažia
Táto metóda využíva závažie zavesené na vlákne ovinutom okolo náboja príruby motora (obr. 2). Os motora musí byť vo vodorovnej polohe. Vlákno musí byť podľa možnosti tenké, mať konštantnú hrúbku, byť dostatočne ohybné, nesmie sa príliš naťahovať a vinutia sa nesmú navzájom krížiť. Po odbrzdení rotora tiaž závažia, pri zanedbaní tiaže vlákna a predpoklade konštantného trenia, spôsobí rozbeh rotora s konštantným uhlovým zrýchlením.
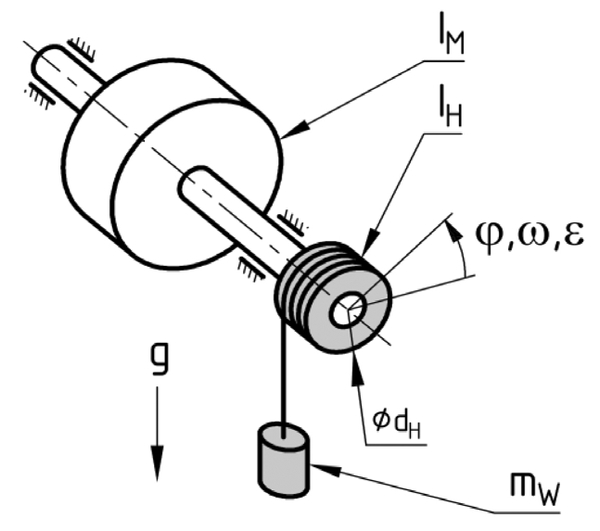 |
| Obr. 2: Schéma princípu merania hmotného momentu zotrvačnosti |
Hmotný moment zotrvačnosti všetkých pohybujúcich sa častí I pozostáva z hmotného momentu zotrvačnosti motora IM, hmotného momentu zotrvačnosti príruby IH (v tomto konkrétnom prípade IH = 5,031•10-3 kg m2), a redukovaného hmotného momentu zotrvačnosti od hmotnosti závažia mW:

Kde: dH = 0,05825 m je priemer stredného vlákna.
Krútiaci moment pôsobiaci na hriadeľ určíme ako:

Kde: g = 9,81 m•s-2 je gravitačné zrýchlenie,
Mf – trecí moment [N.m ].
Potom uhlové zrýchlenie vypočítame ako:

Potom z predchádzajúcich rovníc vyjadríme hmotný moment zotrvačnosti motora:

Závislosť uhla skrútenia od času môžeme vyjadriť ako:

Kde: ϕ0 je počiatočný uhol skrútenia (pri nulovej uhlovej rýchlosti) [rad],
tSTART počiatočný čas (pri nulovej uhlovej rýchlosti) [s].
Túto rovnicu môžeme vo všeobecnosti vyjadriť polynómom druhého stupňa:

Kde a0, a1 a ε/2 sú koeficienty polynómu. Proces odvíjanie sa nahráva a zaznamenávajú sa časy prechodu značky na prírube pred referenčným bodom na telese motora ti. Uhly pootočenia v časoch ti je potom možné určiť ako:

Cez namerané hodnoty boli preložené regresné krivky zodpovedajúce rovnici (6), kde kvadratický koeficient je rovný ε/2. Potom už možno vypočítať hodnotu hmotného momentu zotrvačnosti podľa rovnice (4). Na ilustráciu, na obrázku (obr. 3), uvádzame regresné krivky pre hmotnosť závažia mW = 2 kg.
Namerané a vypočítané hodnoty sú uvedené v tabuľke (tab. 1). Hodnoty hmotného momentu zotrvačnosti v stĺpci *IM sú počítané podľa rovnice (4) bez uvažovania suchého trenia, a hodnoty v stĺpci **IM boli počítané s optimalizovanou hodnotou trecieho momentu Mf .
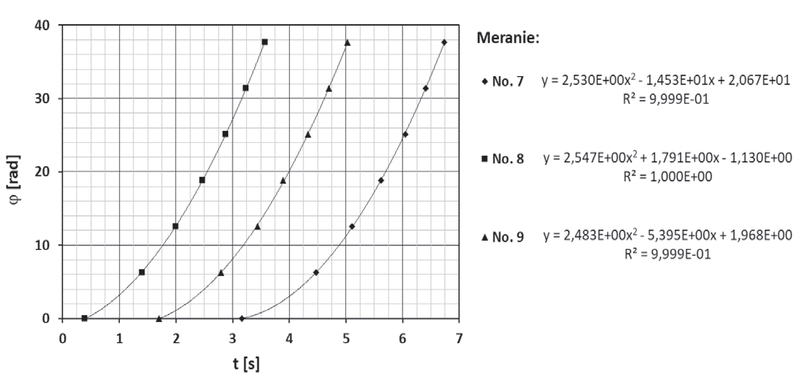 |
| Obr. 3 Grafické znázornenie časového priebehu odvíjania s preloženými regresnými krivkami pre hmotnosť závažia mW = 2 kg |
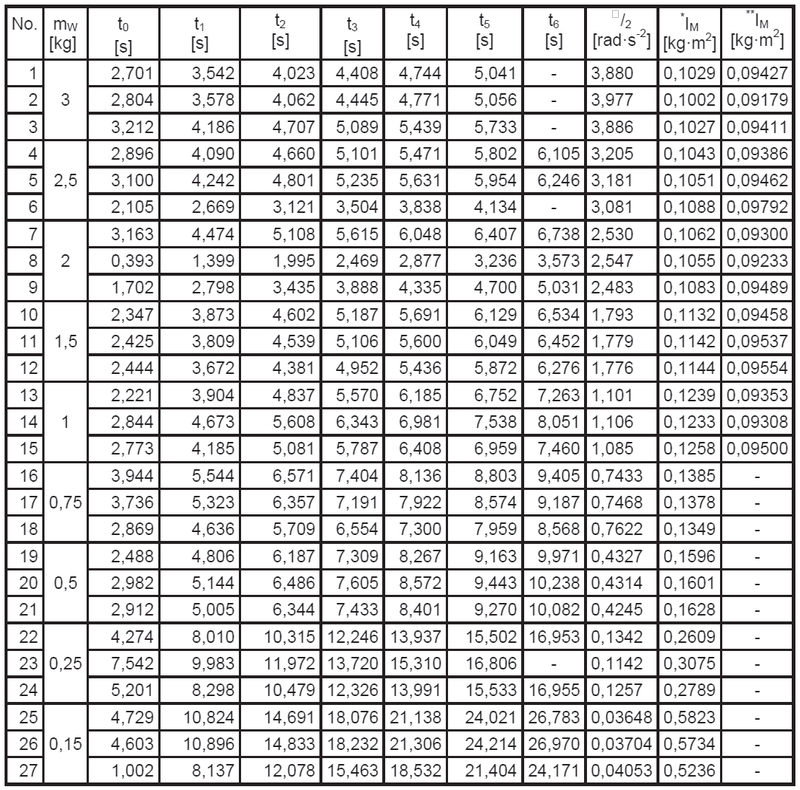 |
| Tab. 1: Namerané a vypočítané hodnoty |
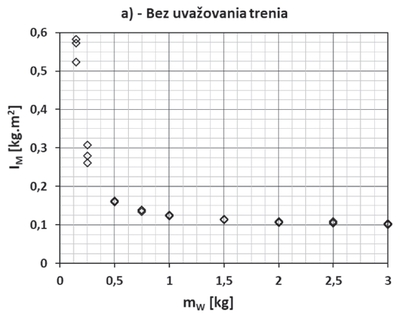
Na obrázku (obr. 4a) sú graficky znázornené vypočítané hodnoty hmotného momentu zotrvačnosti IM v závislosti od hmotnosti závažia mW. Hodnoty vypočítaného hmotného momentu zotrvačnosti IM ležia vo veľmi širokom rozsahu. Mierne stúpajú s klesajúcou hmotnosťou závažia od maxima mW = 3 kg približne po mW ≈ 1 kg, potom rapídne stúpajú od mW ≈ 0,5 kg. Vypočítané hodnoty IM pre hmotnosti mW = 0,25 a 0,15 kg majú navyše značný rozptyl. Uvedené skutočnosti môžeme pripísať stúpajúcemu vplyvu trecieho momentu Mf na vypočítanú hodnotu hmotného momentu zotrvačnosti IM pre nízke hmotnosti závažia.
Na obrázku (obr. 4b) sú znázornené vypočítané hodnoty hmotného momentu zotrvačnosti IM pre optimalizovanú konštantnú hodnotu trecieho momentu. Keďže vplyv trenia sa so znižujúcou hmotnosťou závažia zväčšuje, tak na výpočet boli použité len namerané hodnoty pre hmotnosť závažia mW ≥ 1 kg. Z obrázku (obr. 4b) je zrejmé, že vypočítané hodnoty sú veľmi podobné nezávisle od hmotnosti závažia, a v rámci meraní s rovnakým závažím hodnoty nevykazujú výrazný rozptyl. Hodnota trecieho momentu Mf bola optimalizovaná tak, aby súčet štvorcov odchýlok medzi vypočítanými hodnotami IM a ich strednou hodnotou IM bol minimálny. Priemerná hodnota vypočítaného hmotného momentu zotrvačnosti IM = 0,09426 kg•m2. Výberová smerodajná odchýlka vypočítaných hodnôt SIM = 0,001488 kg•m2, čo zodpovedá 1,58 % zo strednej hodnoty. Optimalizovaná hodnota konštantného trecieho momentu je Mf = 0,06681 N•m. Na praktické účely môžeme hmotný moment zotrvačnosti motora vyjadriť ako IM = 0,094 ± 0,0015 kg•m2.
 |
 |
| Obr. 4: Vypočítané hodnoty hmotného momentu zotrvačnosti motora | |
Záver
Na základe uvedených výsledkov môžeme povedať, že navrhovaná metóda určovania hmotného momentu zotrvačnosti pre použitý elektromotor a konkrétne meranie udáva výsledky s pomerne malým rozptylom, smerodajná odchýlka zodpovedá približne 1,58 % zo strednej vypočítanej hodnoty. Pri použití dostatočného počtu závaží s rozdielnou hmotnosťou a dostatočného počtu meraní možno predpokladať, že navrhnutá metóda bude dávať pre hmotný moment zotrvačnosti spoľahlivé a prakticky využiteľné výsledky.
Najväčšou výhodou uvedenej metódy je použitie veľmi jednoduchého a dostupného vybavenia a tiež rýchlosť získania výsledkov bez potreby demontáže rotora. Presnosť a spoľahlivosť by bolo potrebné ešte overiť niektorou z metód merania hmotného momentu zotrvačnosti s vylúčením trenia, napr. metódou bifilárneho kyvadla s vymontovaným rotorom.
Zároveň by bolo potrebné overiť, či predpoklad konštantného suchého trenia v ložiskách rotora (jeho nezávislosti od otáčok a hmotnosti závažia) je dostatočne splnený.
TEXT/FOTO Peter Kaššay, Robert Grega, Matej Urbanský, Katedra konštrukčného a dopravného inžinierstva, Strojnícka fakulta, TU v Košiciach
POUŽITÁ LITERATÚRA
[1] BEARDS, C. F.: Structural Vibration Analysis and Damping. Arnold, London 1996. ISBN 0 340 64580 6.
[2] BREPTA, R., PŮST, L., TUREK, F.: Mechanické kmitání. Sobotáles, Praha 1994. ISBN 80-901684-8-5.
[3] GUSTOF, P., HORNIK, A., CZECH, P., JĘDRUSIK, D.: The influence of engine spe-ed on thermal stresses of the piston. Scientific Journal of Silesian University of Technology: Series Transport, Volume:93, 2016, pp.23-29, ISSN 0209-3324.
[4] HOMIŠIN, J., URBANSKÝ, M.: Results of measurement of transitional effects at air pressure changes in pneumatic coupling during mechanical system operation. In: Scientific Journal of Silesian University of Technology-Series Transport 72, 41–50 (2011). ISSN 0209-3324.
[5] KAŠŠAY, P.: Modelovanie, analýza a optimalizácia torzne kmitajúcich mechanických sústav: Habilitačná práca. Technická univerzita v Košiciach, Košice 2014.
[6] POLIAK, F., FEDÁK, V., ZBORAY, L.: Elektrické pohony. SNTL, Praha 1987.
[7] SKRZYPCZYK, P., KALUŻA, R., CZECH P.: Braking process of enduro and highway tourist motorbikes. Scientific Journal of Silesian University of Technology: Series Transport, Volume: 87, 2015, pp.49-62, ISSN 0209-3324.