Verifikácia riešenia výskumných úloh rôzneho druhu a náročnosti z oblasti priemyselných systémov si často vyžaduje vzhľadom na svoju náročnosť laboratória vybavené príslušnými zariadeniami alebo konkrétnymi fyzikálnymi modelmi týchto systémov. Takéto zariadenia sú často vzhľadom na svoju špecifickosť technicky aj finančne náročné a využiteľné len pre riešenie úzkej triedy problémov.
Verifikácia riešenia výskumných úloh rôzneho druhu a náročnosti z oblasti priemyselných systémov si často vyžaduje vzhľadom na svoju náročnosť laboratória vybavené príslušnými zariadeniami alebo konkrétnymi fyzikálnymi modelmi týchto systémov. Takéto zariadenia sú často vzhľadom na svoju špecifickosť technicky aj finančne náročné a využiteľné len pre riešenie úzkej triedy problémov.
Preto je vhodné mať pre účely výskumu, ale aj vzdelávania, zariadenia, ktoré sú univerzálne použiteľné pre široké spektrum úloh, pričom výsledky, ktoré je možné pomocou nich získať, sa dajú s vysokou pravdepodobnosťou aplikovať aj v technickej praxi. Príkladom takýchto zariadení sú nástroje pre HIL (hardware-in-the-loop) simulácie, ktoré sa líšia od počítačových simulácií, pretože ich podstatnou súčasťou sú hardvérové časti skúmaného systému, ktorého vlastnosti sú verifikované. To umožňuje realistickejšie zhodnotenie vlastností overovaného systému predovšetkým v reálnom čase aj vďaka najnovším počítačovým technológiám [1 – 3].
V článku je navrhnutá a diskutovaná nová koncepcia hardware-in-the-loop (HIL) pracoviska, ktoré slúži ako efektívny nástroj na riešenie úloh vzdelávania a výskumu v oblasti modelovania a riadenia technických dynamických systémov. Koncepcia pracoviska je postavená na bežne dostupných a používaných hardvérových (Programable Logic Controller) a softvérových prostriedkoch (MATLAB) tak, aby bolo možné pracovať s každým typom spojitých aj diskrétnych dynamických systémov. Ďalej táto koncepcia umožňuje štandardizovaný vzdialený prístup (Remote acces) cez internet prostriedkami používanými v operačnom systéme Windows.
Koncepcia HIL pracoviska
Základné požiadavky, kladené na navrhované HIL pracovisko, na báze ktorých bola zostavená jeho koncepcia, sú:
1. Pracovisko musí pokrývať čo najširšiu triedu dynamických systémov.
2. Z hľadiska modelovaného systému musí mať štandardizované vstupy a výstupy, t. j. +/-10 V, 4-20 mA, 24V DC, 230V AC, PWM výstupy, rýchle impulzné vstupy pre inkrementálne snímače a pod.
3. Údržba pracoviska musí byť čo najjednoduchšia a rýchla, pretože počas vzdelávacieho procesu nie je možné čakať niekoľko týždňov na jeho opravu.
4. Na riešenie úloh na pracovisku by sa mali používať podľa možnosti štandardizované, všeobecne známe a používané programovacie prostriedky.
Na základe týchto požiadaviek bola navrhnutá koncepcia pracoviska podľa obr. 1.
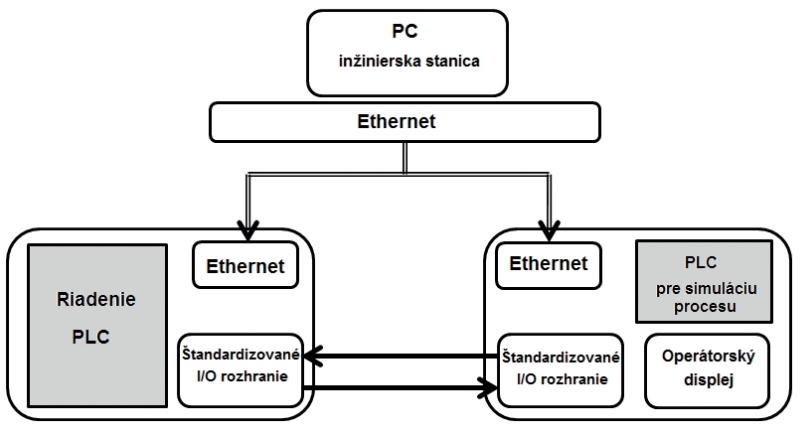 |
| Obr. 1: Základná koncepcia HIL pracoviska |
Pracovisko sa skladá z dvoch štandardných programovateľných automatov a jedného štandardného PC počítača. Komunikácia medzi týmito zariadeniami je cez štandardizované ethernet rozhranie. Prvé PLC, vybavené operátorským displejom, slúži na modelovanie riadeného technologického procesu (napríklad elektrického pohonu, robota a pod.). Operátorský displej umožňuje parametrizovať model procesu a tiež externe modelovať rôzne prevádzkové situácie, napríklad zmenu záťažového momentu pohonu a pod.
Druhé PLC slúži ako riadiaci člen systému a umožňuje skúšať rôzne varianty regulátorov. Prepojenie riadiacich a informačných signálov medzi regulátorom a modelom procesu je realizované pomocou štandardizovaných elektrických signálov, čo umožňuje prakticky okamžité a bezproblémové prepojenie navrhnutých riadiacich členov na reálny technologický proces. Pri realizácii pracoviska boli v našom prípade použité programovateľné automaty.
Štandardný PC počítač s operačným systémom Windows umožňuje programovať ako riadiace PLC, tak aj PLC pre simuláciu technologického procesu. Za týmto účelom je na ňom potrebné nainštalovať programový balík od výrobcu použitých PLC a prípadne softvér pre modelovanie dynamických systémov, ktorý umožní porovnať výsledky analytického modelovania riešenej úlohy s výsledkami, dosiahnutými na HIL pracovisku. Pretože v tomto prípade boli použité PLC od firmy B@R, pre ich programovanie bol nainštalovaný na PC programový balík Automation Studio 4.2. Ako prostriedok pre modelovanie bol nainštalovaný balík Matlab aj s príslušnými nástrojmi.
Podľa vyššie popísanej koncepcie bolo realizované HIL pracovisko podľa obr. 2.
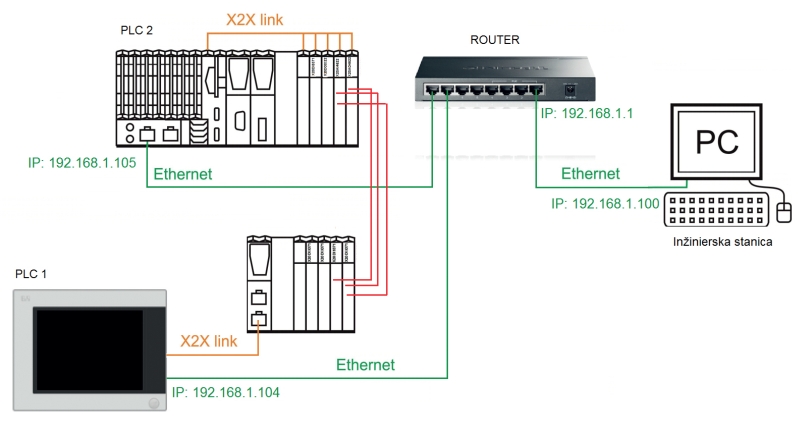 |
| Obr. 2: Zapojenie konkrétneho HIL pracoviska |
Realizácia uvedeného HIL pracoviska je ukázaná na obr. 3.
 |
| Obr. 3: Realizácia HIL pracoviska |
Vlastnosti navrhnutého HIL pracoviska
Navrhnuté pracovisko je zostavené iba zo štandardných, priemyselne vyrábaných a dodávaných zariadení a programových produktov. Ako Matlab, tak aj priemyselné PLC umožňujú v princípe pracovať (t. j. modelovať a programovať) prakticky ľubovoľný dynamický systém. Veľkosť tohto systému je teoreticky neobmedzená (v zmysle neobmedzená použitou koncepciou) a prakticky bude obmedzená iba výkonovou kapacitou použitých PLC a štandardného PC. Na prácu s rozsiahlejšími MIMO systémami bude potrebné použiť výkonnejšie PLC a prípadne aj PC.
Priemyselné PLC majú implicitne zabudované priemyselne štandardizované vstupy a výstupy, pričom umožňujú v zásade modulárne meniť ich počty a typy, čo zaručuje vysokú variabilitu úloh, ktoré je potrebné riešiť, a prípadne vyučovať na takomto pracovisku. Výmena riešenej úlohy je vlastne len otázkou zmeny príslušného programu v PLC a prípadne nového prepojenia štandardizovaného IO rozhrania, čo napríklad pri vzdelávacích úlohách (pri ktorých sa nepredpokladá veľké množstvo IO) zaberie minimálne množstvo času.
Vzhľadom na priemyselnú výrobu jednotlivých podsystémov navrhnutého pracoviska je možné predpokladať, že si bude vyžadovať minimálnu hardvérovú údržbu. Prípadné poruchy hardvéru je možné riešiť jednoduchou výmenou pokazených súčastí, napríklad vstupno-výstupných modulov PLC. Vzhľadom na predpoklad, že pracovisko budú využívať viacerí používatelia na riešenie rôznych odlišných úloh a každý z nich môže prekonfigurovať jeho programové nastavenie, údržbu programov umožňuje predložená koncepcia riešiť jednoduchým zálohovaním a obnovením obrazu HD použitého PC.
* * * * *
Navrhnutá koncepcia sa líši od bežne používaných HIL pracovísk hlavne tým, že na modelovane riadeného systému používa štandardizované PLC, a nie jeho fyzikálny model (resp. jeho fyzikálnu kópiu).
* * * * *
Na jednej strane to neumožňuje detailne vystihnúť všetky fyzikálne vlastnosti riadeného systému, na druhej strane však umožňuje veľmi pohodlne a rýchlo variovať riešené úlohy. Podstatnou vlastnosťou navrhovanej koncepcie je aj to, že umožňuje časové riadenie riešenia danej úlohy, synchronizovať a prípadne spomaliť/zrýchliť výpočtový čas oboch PLC voči reálnemu času. To môže byť vhodné napríklad v prípade, ak niektoré PLC kapacitne nestačí na riešenie danej úlohy, t. j. v rámci reálnej doby vzorkovania nestihne realizovať všetky výpočty modelu technológie alebo regulátora.
Záver
Článok sa zaoberá návrhom a realizáciou univerzálneho hardware in the loop pracoviska (HIL) pre oblasť modelovania a riadenia spojitých alebo diskrétnych dynamických systémov. Celá koncepcia je postavená na požiadavke čo najširšej univerzálnosti pri využívaní pracoviska a na požiadavke využitia štandardizovaných, bežne dostupných zariadení pri jeho realizácii. Z uvedených dôvodov boli obidva podsystémy HIL pracoviska (testovací a simulačný) postavené na báze štandardne dostupných programovateľných automatov. Pracovisko je využívané hlavne na riešenie úloh z oblasti elektrických pohonov, mechatroniky, robotiky a riadenia technologických liniek. Z pedagogického hľadiska je dôležitá variabilita riešenia jednotlivých úloh, čo navrhnutá koncepcia HIL pracoviska postavená na báze dvoch PLC umožňuje. Z hardvérového hľadiska ide o jednoduchú zmenu počtu a typov štandardizovaných vstupov a výstupov PLC. Zo softvérového hľadiska je, samozrejme, potrebná zmena príslušného programu v PLC.
Poďakovanie:
Podporujeme výskumné aktivity na Slovensku/Projekt je spolufinancovaný zo zdrojov EÚ. Tento článok bol vypracovaný v rámci projektu „Výskum unikátneho nízkoenergetického statického zdroja pre elektrosystémy“, ITMS 26220220029.
TEXT/FOTO: Peter Talian, Daniela Perduková
Literatúra
[1] LINJAMA, M., VIRVALO, T., GUSTAFSSON, J., et al. (2000). Hardware-in-the-loop environment for servosystem controller design, tuning and testing. Microproc. and Microsy., 24(1), Mar 29, 2000, pp. 13 – 21.
[2] BOUSCAYROL, A.: Different types of Hardware-In-the-Loop simulation for electric drives. IEEE International Symposium on Industrial Electronics ISIE 2008, July 2008, pp. 2 146 – 2 151, Cambridge.
[3] OSAMA, A. M., ABED, N. Y. (2008). Real-time simulation of electric machine drives with hardware-in-the-loop. COMPEL – The international journal for computation and mathematics in electrical and electronic engineering, Vol. 27, Iss: 4, 2008, pp. 929 – 938.