 Výskumné aktivity Centra moderných metód riadenia a priemyselnej informatiky na KKUI FEI TU v Košiciach v kontexte Industry 4.0 sú zamerané na riešenie úloh modelovania, riadenia a diagnostiky mechatronických systémov v rámci „Centra pre nedeštruktívnu diagnostiku technologických procesov so štandardným softvérovým vybavením pre riadenie a komunikáciu“ (podaktivita 3.1 projektu TECHNICOM) a Grantu FEI s názvom „Výskumné laboratórium podaktuovaných nelineárnych dynamických systémov“.
Výskumné aktivity Centra moderných metód riadenia a priemyselnej informatiky na KKUI FEI TU v Košiciach v kontexte Industry 4.0 sú zamerané na riešenie úloh modelovania, riadenia a diagnostiky mechatronických systémov v rámci „Centra pre nedeštruktívnu diagnostiku technologických procesov so štandardným softvérovým vybavením pre riadenie a komunikáciu“ (podaktivita 3.1 projektu TECHNICOM) a Grantu FEI s názvom „Výskumné laboratórium podaktuovaných nelineárnych dynamických systémov“.
Cieľom predloženého článku je prezentácia jednotlivých modelových pracovísk, ktoré slúžia na návrh a simulačné overenie algoritmov riadenia a diagnostiky, pričom je stručne prezentovaná metodika, akou sú jednotlivé výskumné úlohy riešené.
Riešenie úloh diagnostiky mobilných robotov
V riešení úloh diagnostiky mobilných robotov je vhodné využiť metodický postup, ktorý v sebe zahŕňa analýzu, matematicko-fyzikálne modelovanie, riadenie, simulačné overenie a samotnú realizáciu mobilných robotov v konkrétnych aplikáciách [1]. Tento metodický postup je bližšie analyzovaný na príklade mobilných robotov rôzneho charakteru, využitých vo vybraných modelových aplikáciách a to:
1. modelová aplikácia – hľadanie cesty v bludisku,
2. modelová aplikácia – riadenie polohy mobilných robotov v rovine po trajektórii.
V prípade mobilných robotov sú metódy nedeštruktívnej diagnostiky založené na spájaní výsledkov offline simulácií matematických modelov a údajov, ktoré sú zbierané reálnymi snímačmi v uvedených modelových aplikáciách.
Matematické modelovanie, riadenie a simulácia modelov mobilných robotov
Cieľom matematického modelovania mobilného robota je získanie simulačného modelu, označovaného aj pojmom Digital twin, ktorý v čo najväčšej možnej miere pokrýva jeho reálne správanie ako v otvorenej, tak v uzavretej slučke. Vo všeobecnosti je takto uvažovaný model mobilného robota zložený z kinematického modelu, ktorý vyjadruje pohybové vlastnosti mobilného robota vzhľadom na konštrukciu podvozka a dynamického modelu, ktorý pokrýva vplyvy hmotnosti, zotrvačnosti, trení alebo dynamík motorov na celkové pohybové vlastnosti robota (obr. 1).
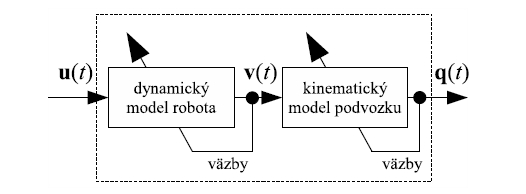 |
| Obr. 1: Bloková schéma mobilného robota |
Vstupom u(t) do neriadeného mobilného robota sú v závislosti od definície presnosti dynamického modelu trakčné sily, vyvíjané krútiace momenty respektíve napätia vinutí cievok DC motorov. Stavovými veličinami dynamického modelu sú rýchlosti v(t), a to buď celkové, alebo vyjadrené pre jednotlivé kolesá. Polohové veličiny q(t) sú výstupom kinematického modelu, pričom môžu zahŕňať aj uhlové natočenia jednotlivých kolies.
Získaný matematický model mobilného robota (MR) je ďalej potrebné implementovať do vhodného simulačného nástroja, ako je napríklad MATLAB/Simulink, čím je s využitím tohto modelu možné ďalej overiť funkcionalitu a stabilitu riadiacich štruktúr pre zvolené ciele riadenia. V prípade modelových aplikácii sú matematické modely realizované ako simulačné modely a spolu s riadiacimi algoritmami sú zoskupené vo vytvorenej simulačnej knižnici.
*****
V odvodení je možné aplikovať Newtonov alebo Lagrangeov prístup pričom dynamika robota môže byť využitá v syntéze riadenia rýchlostí kolies [2].
*****
 |
|
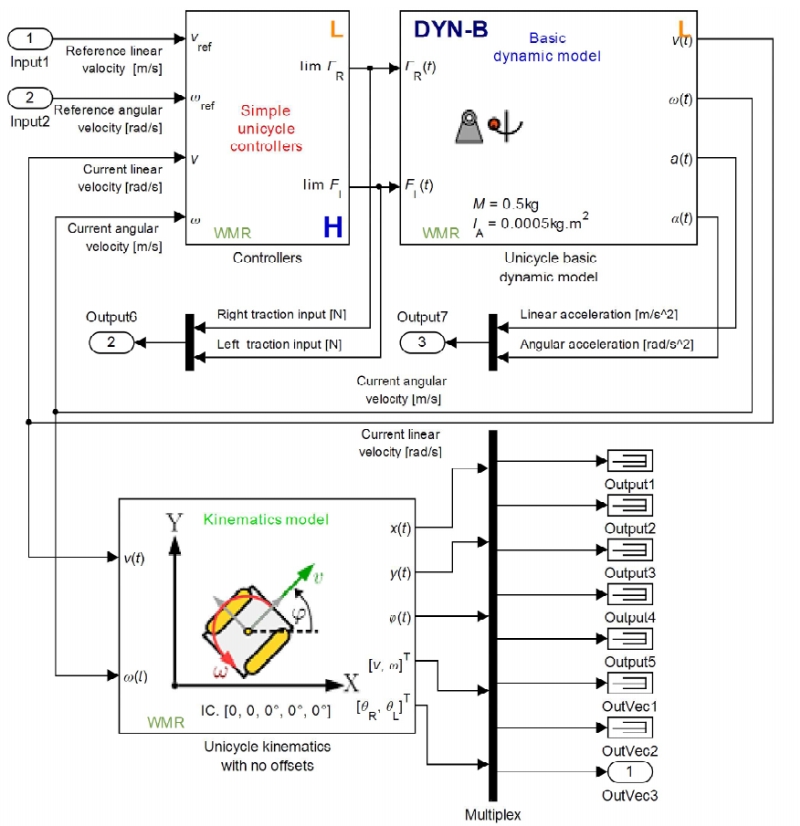
Obr. 2: Príklad riadenia simulačného modelu mobilného robota v prostredí Simulink |
Príklad simulačného modelu MR v prostredí Simulink je znázornený na obr. 2. Tieto simulačné modely je možné ďalej aplikovať aj v návrhu a programovaní reálnych modelov mobilných robotov [3]. Samotnú simuláciu riadenia polohy robota v rovine je výhodné vizualizovať ako animovaný pohyb, a to napríklad offline vizualizáciou založenou na báze OpenGL, a to buď priamo v MATLAB-e alebo v osobitnej aplikácii (obr. 3).
 |
| Obr. 3: Vizualizácia mobilného robota vytvorená v rámci knižnice v prostredí MATLAB |
Laboratórne modely mobilných robotov
Vývoj laboratórnych modelov mobilných robotov pozostáva z návrhu mechanickej a elektronickej časti pomocou CAD softvérov a realizácie riadiaceho programu v jazyku C. Ako riadiaci člen je v tomto prípade použitý 32-bitový jednočipový mikropočítač STM32F103 s jadrom ARM Cortex-M3 [4], ktorý zabezpečuje ovládanie periférií MR, zber údajov zo snímačov a komunikáciu s nadradeným riadiacim členom prostredníctvom Bluetooth komunikačného modulu.
Laboratórne modely mobilných robotov sú vybavené redundantnými snímačmi relatívnej polohy, ako napríklad akcelerometer, gyroskop a digitálny kompas, ktoré sú pripojené k jednočipovému mikropočítaču pomocou komunikačného rozhrania SPI.
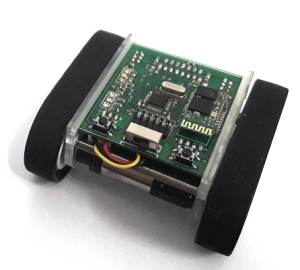
Na účely testovania algoritmov riadenia a diagnostiky mobilných robotických systémov sú vytvorené dva typy mobilných robotov, ktoré sú zobrazené na obr. 4. Oba typy MR využívajú na riadenie rovnakú riadiacu elektroniku a podobný typ akčných členov.
 |
| Obr. 4: Laboratórne modely mobilných robotov s diferenciálnym podvozkom |
Riadiaci systém mobilných robotov
Na riadenie MR je vytvorený viacúrovňový riadiaci systém implementovaný priamo v jednočipovom mikropočítači. Jednotlivé časti tohto systému majú za úlohu regulovať rýchlosť otáčania kolies, ovládať pohyb MR na základe spätnoväzbového regulátora polohy a komunikovať s nadradeným riadiacim systémom za účelom prijímania príkazov a vysielania hodnôt snímačov a vnútorného stavu MR [5]. Celková konceptuálna schéma tohto riadiaceho systému je zobrazená na obr. 5. Riadiaci program MR je navrhnutý tak, aby bolo možné k jednotlivým perifériám MR pristupovať či už z používateľského programu uloženého v jednočipovom mikropočítači alebo prostredníctvom komunikačného rozhrania. Univerzálnosť tohto riadiaceho systému MR spočíva v tom, že môže byť použitý pre rôzne typy diferenciálnych podvozkov jednoduchou zmenou jednotlivých parametrov.
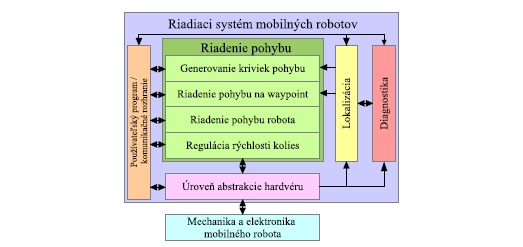 |
| Obr. 5: Konceptuálna schéma riadiaceho systému mobilných robotov |
Úroveň abstrakcie hardvéru (Hardware Abstraction Layer – HAL) slúži na premostenie hardvéru MR so zvyškom riadiaceho systému MR. Jej úlohou je odbremeniť programátorov vyšších vrstiev programu od nutnosti poznať presné zapojenie a štruktúru použitého hardvéru.
Riadenie pohybu zabezpečuje všetky úkony spojené s riadením pohybu MR počnúc reguláciou rýchlosti otáčania kolies až po generovanie bodov pohybu. Celý systém riadenia pohybu bol rozdelený na niekoľko funkčných blokov, pričom každý funkčný blok vyššej úrovne využíva funkcionalitu nižších úrovní.
Lokalizácia má za úlohu čo najpresnejšie určiť relatívnu, prípadne, ak je to možné, absolútnu polohu MR v priestore. Informácia o aktuálnej polohe následne slúži ako spätná väzba pre riadenie polohy MR po požadovanej trajektórii. Na určenie polohy MR sa využíva kombinácia absolútnej lokalizácie pomocou kamerového systému umiestneného nad priestorom pohybu MR v spojení s relatívnou lokalizáciou MR na základe údajov z odometrie a ďalších snímačov ako sú gyroskop, akcelerometer a kompas.
Používateľský program/komunikačné rozhranie slúži na ovládanie jednotlivých častí MR. Celý riadiaci systém je navrhnutý tak, aby bolo možné k jednotlivým častiam tohto systému pristupovať či už pomocou programových funkcií na úrovni používateľského programu, alebo pomocou textových správ prenášaných cez komunikačné rozhranie.
Riadenie mobilných robotov na úrovni počítača
Softvér pre riadenie mobilných robotov na úrovni počítača je realizovaný v jazyku C++ s využitím systému ROS [6], čo umožňuje modulárne riešenie danej aplikácie. Celý systém riadenia MR na úrovni PC je rozdelený do viacerých programových modulov, ktoré sú medzi sebou prepojené komunikačnými kanálmi (topikmi). Celková konceptuálna štruktúra jednotlivých topikov v rámci riadiaceho systému ROS je zobrazená na obr. 6, pričom aktuálna konfigurácia prepojenia jednotlivých programových modulov sa realizuje pomocou spúšťacích súborov (launchfile). Všetky moduly sú od seba nezávislé, môžu teda pracovať samostatne, prípadne sa na ne môžu napojiť iné moduly s kompatibilnými typmi správ.
 |
| Obr. 6: Bloková schéma programových modulov a ich prepojení pre riadenie pohybu mobilných robotov |
Programové moduly USB_CAM, JOY a KEYBOARD sú štandardné programové moduly (PM) na prácu s jednotlivými periférnymi zariadeniami. PM USB_CAM slúži na načítavanie obrazu z kamery a jeho sprostredkovanie PM VIDENIE. PM JOY a KEYBOARD slúžia na načítanie používateľského vstupu pri manuálnom riadení pohybu MR.
Programový modul VIDENIE (VISION) slúži na určovanie polohy mobilných robotov a loptičky na hracej ploche [7]. Vstupom modulu je aktuálny obraz hracej plochy získaný z programového modulu USB_CAM. Nad týmto obrazom sú realizované algoritmy spracovania obrazu s využitím knižníc OpenCV za účelom lokalizácie loptičky a jednotlivých robotov pohybujúcich sa na hracej ploche [8]. Po lokalizácii sú roboty zaradené do tímov na základe tímovej farby tvoriacej minimálne 3,5 x 3,5 centimetrov plochy unikátneho štítku umiestneného na vrchnej strane robota. Ak ide o robota patriaceho do tímu, pre ktorý bol modul VIDENIE spustený, tak na základe štítku sa zároveň určí identifikačné číslo daného robota. Všetky získané informácie o robotoch vrátane pozície a natočenia robotov, ako aj pozícia loptičky sú následne publikované do jednotlivých komunikačných kanálov, ktoré môžu byť odoberané ostatnými programovými modulmi. Modul VIDENIE zároveň zabezpečuje vizualizáciu celej situácie na hracej ploche v grafickom okne aplikácie.
Programový modul KOMUNIKÁCIA (COMM) zabezpečuje nepretržité spojenie s mobilnými robotmi prostredníctvom Bluetooth kanálu [9]. Jeden spustený proces programového modulu KOMUNIKÁCIA dokáže zabezpečiť komunikáciu práve s jedným robotom, teda pre každého robota je potrebné spustiť osobitný proces. Na spustenie procesu je potrebné definovať identifikačné číslo robota a jedinečnú MAC adresu Bluetooth modulu umiestneného na robotovi. Tento proces sa po spustení snaží nadviazať spojenie s daným robotom a v prípade, že je robot vypnutý, alebo nie je v dosahu, spustený proces čaká a robota pripojí hneď, ako sa dostane do dosahu Bluetooth modulu počítača. Hlavnou úlohou tohto programového modulu je poskytovať ostatným modulom možnosť ovládať rýchlosti robota a zároveň získavať informácie o jeho stave, ako sú údaje z odometrie alebo z jednotlivých snímačov robota. Programový modul disponuje aj schopnosťou zotaviť sa z chybových situácií, ako napríklad znovupripojenie robota v prípade výpadku a znovuobnovenia napájacieho napätia robota.
* * * * *
Programový modul FILTER kombinuje informácie o polohe z programových modulov.
* * * * *
Modul VIDENIE dokáže rozpoznať len dynamicky sa pohybujúce objekty, preto bolo potrebné zabezpečiť, aby boli informácie o polohe jednotlivých robotov dostupné aj vtedy, keď robot stojí, alebo sa pohybuje veľmi pomaly. Za týmto účelom bol vytvorený programový modul FILTER, ktorý zabezpečí publikovanie informácií o pozícii robotov aj v tom prípade, že modul VIDENIE nedokáže robota rozpoznať, a to pomocou odometrických údajov robota získaných z modulu KOMUNIKÁCIA. Týmto spôsobom poskytuje nepretržitú informáciu o presnej polohe jednotlivých mobilných robotov.
Programový modul REGULÁTOR (REGULATOR) zabezpečuje výpočet série lineárnych a uhlových rýchlostí, ktoré dostanú robota z jeho aktuálnej pozície do cieľového bodu v priestore [7]. Jeho fungovanie zabezpečuje dvojica spätnoväzbových P-regulátorov, z ktorých jeden sa stará o minimalizáciu vzdialenosti medzi aktuálnou a cieľovou pozíciou robota a druhý zabezpečuje minimalizáciu uhla, pod ktorým robot „vidí“ cieľový bod. Vypočítaná lineárna a uhlová rýchlosť je následne zaslaná do robota prostredníctvom programového modulu KOMUNIKÁCIA.
Programový modul ŠTATISTIKA (STATISTIC) sa používa na zber a ukladanie informácií o jednotlivých robotoch [7]. Tieto údaje sa ukladajú do CSV súborov počas celej doby behu tohto modulu. Medzi ukladané údaje patria informácie o polohe a orientácii robota získané z modulov VIDENIE a KOMUNIKÁCIA. V prípade, že sú k robotovi pripojené dodatočné snímače, sa do týchto súborov ukladajú aj informácie z akcelerometra, gyroskopu a kompasu na robotovi získané prostredníctvom modulu KOMUNIKÁCIA. Tieto uložené údaje sa ďalej používajú na offline analýzu.
Programový modul TRAJEKTÓRIA (TRAJECTORY) generuje rôzne typy trajektórií ako napríklad kruh, osmička alebo kvet, ktoré slúžia ako referenčné trajektórie pre riadenie polohy mobilných robotov [7]. Tento modul slúži hlavne na ladenie ostatných programových modulov. Generovanie trajektórie je realizované ako generovanie cieľových pozícií robota v definovaných časových intervaloch. Tieto pozície odoberá programový modul REGULATOR a navádza mobilného robota na danú cieľovú pozíciu. Údaje zozbierané programovým modulom ŠTATISTIKA pri pohybe mobilných robotov po týchto testovacích trajektóriách slúžia na testovanie algoritmov diagnostického systému mobilných robotov na základe offline nazbieraných dát.
Programové moduly TAKTIKA (TACTIC) a AGENT zabezpečujú realizáciu zvolených stratégií a slúžia na riadenie pohybu mobilných robotov pri hraní robotického futbalu. Tieto programové moduly sú aktuálne vo vývoji v rámci riešených diplomových a dizertačných prác.
Nedeštruktívna diagnostika mobilných robotov
Metodika riešenia úloh diagnostiky vychádza z predpokladu, že uvažované mobilné roboty obsahujú hardvérovú a analytickú nadbytočnosť vo forme redundantných snímačov a matematických modelov. Použitie rôznorodých snímačov a analytickej nadbytočnosti umožňuje necitlivosť voči výskytu rôznych externých poruchových veličín. S využitím známych akčných zásahov a na základe referenčných matematických modelov je možné odhadnúť bezporuchové správanie sa mobilných robotov, ktoré slúži ako vzor pre odhaľovanie vopred neznámych poruchových javov pôsobiacich na systémy MR. Na obr. 7 je znázornená viacúrovňová štruktúra diagnostického systému na spracovanie údajov z viacerých zdrojov, pričom jednotlivé úrovne slúžia na detekciu a identifikáciu rôznych typov chýb.
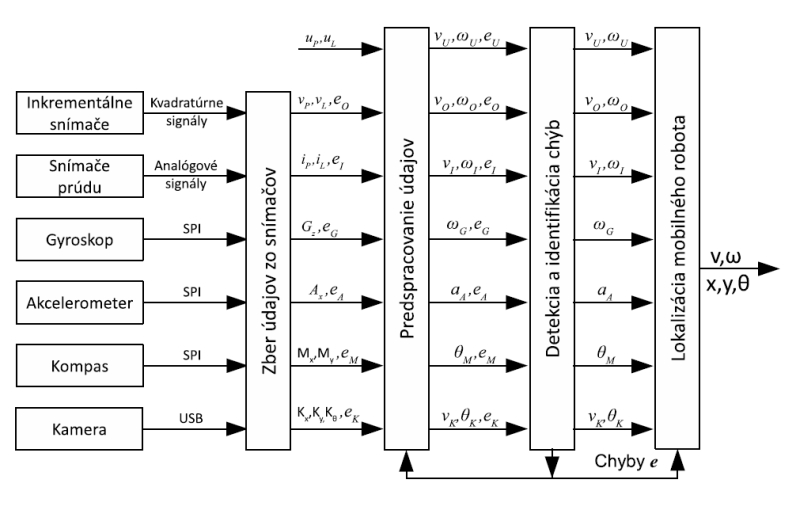 |
| Obr. 7: Bloková schéma viacúrovňového diagnostického systému mobilných robotov |
Údaje zo snímačov k riadiacej elektronike MR pripojené pomocou komunikačných rozhraní (UART, SPI, I2C, USB, atď.) alebo pomocou digitálnych a analógových periférií (digitálne vstupy/výstupy, analógové vstupy, čítačky, atď.).
Zber údajov zo snímačov zabezpečuje periodické načítavanie údajov z rôznych typov snímačov pomocou periférií jednočipového mikropočítača. Funkciu periodického načítania údajov zo snímačov má za úlohu vrstva abstrakcie hardvéru riadiaceho systému MR. Diagnostika na tejto úrovni slúži na odhalenie chýb spojených s prenosom údajov cez komunikačné rozhrania. Výstupom vrstvy zberu údajov zo snímačov sú merané údaje vo fyzikálnych jednotkách, ako napríklad rýchlosti kolies vp(t) a vl(t) merané pomocou inkrementálnych snímačov, prúdy tečúce cievkami motorov ip(t) a il(t), alebo uhlová rýchlosť meraná gyroskopom ωz(t). Výstupom každého snímača je aj ukazovateľ chyby ex(t) daného snímača.
Predspracovanie údajov má za úlohu prepočet meraných hodnôt snímačov na údaje o polohe alebo rýchlosti MR, pričom sa sledujú maximálne rozsahy hodnôt dané fyzikálnymi obmedzeniami daného MR ako je napríklad jeho maximálna lineárna a uhlová rýchlosť a zrýchlenie. Výstupom predspracovania údajov sú informácie o lineárnej rýchlosti vx(t), zrýchlení ax(t), uhlovej rýchlosti ωx(t) alebo uhle natočenia θx(t) MR merané snímačom x a ukazovateľ chyby ex(t) doplnený o informáciu o chybe tejto úrovne.
Detekcia a identifikácia chýb je poslednou časťou diagnostického systému a jej úlohou je odhalenie chýb, ktoré unikli predchádzajúcim úrovniam diagnostického systému. Princípom jej fungovania je sledovanie ukazovateľov chýb (rezíduí) získavaných pomocou sústavy generátorov rezíduí založených na princípe spájania dát z redundantných snímačov a analytickej nadbytočnosti. Každý z týchto generátorov rezíduí má potlačený vstup z iného snímača, čím sa zabezpečí to, že chyba určitého snímača sa prejaví špecifickou kombináciou prekročenia jednotlivých rezíduí. Výstupom tejto úrovne diagnostického systému je informácia o konkrétnej chybe snímača, akčného člena, prípadne informácia o neštandardnom stave v ktorom sa MR nachádza. Neštandardné stavy MR sú napríklad náraz MR do prekážky alebo prešmyk medzi kolesami a plochou po ktorej sa MR pohybuje.
Dáta zo snímačov mobilných robotov sú ukladané do databázy pre neskoršiu offline diagnostiku a vyhodnocovanie kvality riadenia voči referenčným modelom. Súčasne je možné vizualizovať ako 3D animáciu aj vzájomné porovnanie referenčného matematického modelu voči správaniu sa reálneho modelu MR. Prezentovanú navrhnutú metodiku diagnostiky je možné použiť napríklad v servisnej robotike, mobilných robotických systémoch s požiadavkou na zvýšenú spoľahlivosť prípadne s obmedzenou možnosťou servisu.
Modelová aplikácia – hľadanie cesty v bludisku
Táto modelová aplikácia je založená na prehľadávaní bludiska, nájdení najkratšej cesty z počiatočnej pozície do cieľa a na prejdení tejto cesty v čo najkratšom čase. Pri tejto aplikácii je použitý laboratórny model MR s nadstavbou v podobe minipočítača Raspberry Pi a kamery umiestnenej priamo na mobilnom robotovi. Na testovanie algoritmov hľadania najkratšej cesty boli použité programové prostriedky pre simuláciu pohybu MR v bludisku [10].
V tejto modelovej aplikácii je minipočítač Raspberry Pi použitý na rozpoznávanie obrazu za účelom zistenia relatívnych polôh blízkych stien bludiska, ktoré sú použité na korekciu absolútnej polohy MR začiatočnú bunku bludiska. Z informácie o prítomnosti stien sa pomocou algoritmu pre prehľadávanie bludiska určí ďalší pohyb MR, ktorý je následne poslaný do riadiaceho systému MR jednočipového mikropočítača na vykonanie [5].
Informácie o aktuálnom stave prehľadávania bludiska ako aj údajov zo spracovania obrazu sa prenášajú prostredníctvom WiFi do počítača, ktorý tieto údaje vizualizuje. Jednotlivé obrázky z kamery sa ukladajú do pamäte minipočítača Raspberry Pi pre ďalšiu offline analýzu spracovania obrazu.
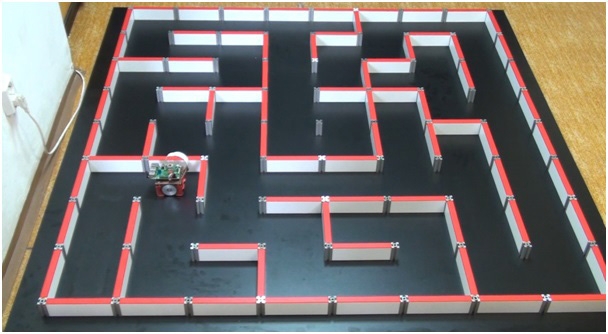 |
| Obr. 8: Mobilný robot v modelovej aplikácii hľadanie cesty v bludisku. |
Modelová aplikácia – riadenie polohy MR v rovine po trajektórii
Táto modelová aplikácia využíva mobilných robotov ako agentov vykonávajúcich pohyb za účelom hrania robotického futbalu. Riešenie stratégie a plánovania pohybu zabezpečujú moduly TAKTIKA a AGENT implementované do systému ROS. Pozície jednotlivých hráčov a loptičky sa získavajú z modulu pre rozpoznávanie obrazu. Na základe aktuálnej situácie na hracej ploche sú vypočítané trajektórie pre jednotlivých robotov, tie sú následne poskytnuté modulu pre sledovanie trajektórie, ktorý zabezpečí pohyb robotov po vygenerovanej trajektórii.
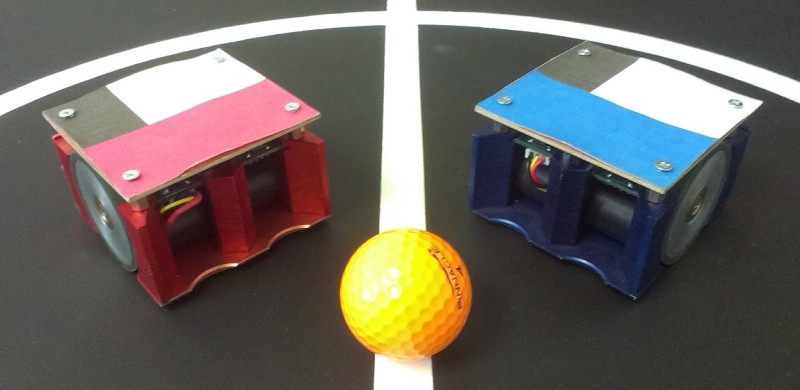 |
| Obr. 9: Modelová aplikácia – spätnoväzobná regulácia polohy MR po trajektórii. |
Záver
Článok je zameraný na časť výskumných aktivít členov CMMRaPI na KKUI FEI TU v Košiciach v kontexte Industry 4.0, ktoré spočívajú v riešení výskumných úloh v rámci dvoch projektov: „Centra pre nedeštruktívnu diagnostiku technologických procesov so štandardným softvérovým vybavením pre riadenie a komunikáciu“ (podaktivita 3.1 projektu TECHNICOM) a Grant FEI TUKE: „Výskumné laboratórium podaktuovaných nelineárnych dynamických systémov“. Cieľom riešených projektov, ako aj tohto príspevku je poukázať na možnosť transferu výsledkov výskumu do praxe so zameraním na využitie navrhnutej metodiky pre riešenie úloh týkajúcich sa modelovania, simulácie, riadenia a diagnostiky mechatronických systémov s dôrazom na mobilnú robotiku.
TEXT/FOTO Anna Jadlovská a kol., TU Košice, Fakulta elektrotechniky a informatiky, Katedra kybernetiky a umelej inteligencie
Ďalší spoluautori:
J. Jadlovský, S. Jadlovská, J. Čerkala, M. Kopčík, J. Čabala, M. Oravec, M. Varga, D. Vošček, M. Tkáčik, A. Březina
Poďakovanie
Článok bol podporený projektom: „Univerzitný vedecký park TECHNICOM pre inovačné aplikácie s podporou znalostných technológií – II. Fáza“, ITMS: 313011D232 (50%) a Grantom TUKE FEI-2015-33: Výskumné laboratórium nelineárnych podaktuovaných systémov (50 %).
Resume
Design of a Methodology for Modeling, Control, Simulation and Non-Destructive Diagnostics of Mobile Robots
The research activities of the Center of Modern Control Techniques and Industrial Informatics at the DCAI, FEEI, TU of Košice are in part focused on modeling, control and diagnostics of mechatronic systems. In accordance with the Industry 4.0 strategy, the research is carried out within the "Center for non-destructive diagnostics of technological processes using standard software for control and communication" (subactivity 3.1 of the TECHNICOM project) and the FEEI grant, "Research Laboratory of Nonlinear Underactuated Systems". The aim of this paper is to present the various model workplaces that are used for the design and verification of control and diagnostics algorithms, while also briefly presenting the methodology by which the individual research tasks are solved.
Literatúra
[1] J. Jadlovský, A. Jadlovská, S. Jadlovská, J. Čerkala, M. Kopčík, J. Čabala, M. Oravec, M. Varga, and D. Vošček, "Research activities of the center of modern control techniques and industrial informatics", SAMI, 2016.
[2] J. Čerkala and A. Jadlovská, "Application of neural models as controllers in mobile robot velocity control loop", Journal of Electrical Engineering, vol. 68, no. 1, pp. 3946, 2017.
[3] J. Čerkala and A. Jadlovská, "Nonholonomic Mobile Robot with Dierential Chassis Mathematical Modelling and Implementation in Simulink with Friction in Dynamics", Acta Electrotechnica et Informatica, vol. 15, no. 3, pp. 38, 2015.
[4] J. Yiu, "The denitive guide to the ARM CortexM3", Newnes, 2009.
[5] M. Kopčík and J. Jadlovský, "Distributed Control System for Mobile Robots with Dierential Drive", in Procedings of the 28th International Conference 2016 Cybernetics & Informatics (K&I), 2016.
[6] M. Jquigley, "ROS: an open-source Robot Operating System", ICRA workshop on open source software, 2009.
[7] A. Březina, "Riešenie úlohy súčasnej lokalizácie a mapovania objektov v prostredí systému ROS", Bakalárska práca, školiteľ: doc. Ing. Ján Jadlovský, CSc., 2017, FEI, TU, pp. 49.
[8] J. Jadlovský, M. Varga, and M. Kopčík, "Image Processing for Localization of Mobile Robots", in Electrical Engineering and Informatics 6 : proceedings of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice, pp. 574-577, Faculty of Electrical Engineering and Informatics, September 2015.
[9] M. Tkáčik, "Realizácia časti DCS s aplikáciou komunikačných protokolov DIM a OPC pre zber a spracovanie veľkého objemu dát a implementácia komunikačných protokolov v rámci mobilných robotických systémov", Bakalárska práca, školiteľ: doc. Ing. Ján Jadlovský, CSc., 2017, FEI, TU, pp. 72.
[10] J. Jadlovský, M. Kopčík, and S. Segiňáková, "Introduction into Maze Mapping and the Shortest Path Finding", in Electrical Engineering and Informatics 6 : proceedings of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice, pp. 621-625, Faculty of Electrical Engineering and Informatics, September 2015.