Článok popisuje nové prístupy v oblasti robotiky. Trendom v danej oblasti je kooperácia človek – robot. Výrobné podniky si, rovnako ako výrobcovia robotov, uvedomujú danú skutočnosť, z čoho vyplýva (na základe štúdie) očakávaný nárast ich využitia v nasledujúcich rokoch. Článok sa zaoberá popisom danej problematiky.
Článok popisuje nové prístupy v oblasti robotiky. Trendom v danej oblasti je kooperácia človek – robot. Výrobné podniky si, rovnako ako výrobcovia robotov, uvedomujú danú skutočnosť, z čoho vyplýva (na základe štúdie) očakávaný nárast ich využitia v nasledujúcich rokoch. Článok sa zaoberá popisom danej problematiky.
Zo strany zákazníkov zaznamenávame neustály dopyt po nových produktoch – to je charakteristika súčasnosti. Pre naplnenie ich požiadaviek je preto potrebné, aby podniky vedeli pružne reagovať na takéto zmeny. Výrobné podniky musia byť z tohto dôvodu plne flexibilné, aby vedeli zákazníkovi dodať daný produkt v požadovanej kvalite, množstve a dizajne v stanovenom čase.
Inovácie a konkurencieschopnosť
Inovovanie výrobných systémov je jednou z kľúčových spôsobov, ako dosiahnuť konkurencieschopnosť podniku. Vo výrobných závodoch hovoríme predovšetkým o automatizácii procesov (príprava výroby, výrobné procesy a podobne), pričom uvažujeme o čo najvyššej rekonfigurovateľnosti a flexibilite daných technológií. Vo veľkých priemyselných výrobách je trendom presunúť pozíciu človeka do oblasti servisu a diagnostiky, v stredných a menších výrobách je trend odlišný a smeruje hlavne do sféry úzkej kooperácie človeka s robotickým systémom. Takéto pracoviská obsahujú priemyselné roboty, s ktorými ľudia priamo kooperujú, či už vo forme vzdialeného ovládania, alebo v priamej spolupráci na jednom pracovisku. Väčšinou sú takéto roboty z bezpečnostného hľadiska v priemysle mechanicky oddelené od zón, v ktorých sa pohybujú ľudia, prípadne je priestor pracoviska zabezpečený bezpečnostnými prvkami, závorami, skenermi a podobne. V prípade prítomnosti osôb v definovanej pracovnej oblasti robota musí robot požadovaným spôsobom prejsť do bezpečného stavu, t. j. napríklad spomaliť svoju činnosť, alebo ju úplne zastaviť. O nový prístup sa v súčasnosti snažia viacerí výrobcovia robotov, ktorí ich vyvíjajú tak, aby boli schopné pracovať po boku človeka s vylúčením akejkoľvek možnosti ujmy na zdraví. V skutočnosti kooperácia človek – robot ponúka komplementárne vlastnosti pre zdokonalenie bežne vykonávaných úloh. Robot je určený na vykonávanie úloh, ktoré sú pre ľudí vyčerpávajúce alebo nebezpečné. Človek však dokáže vykonávať úlohu, ktorá z pohľadu náročnosti alebo zložitosti nemôže jednoducho vykonávať robot. Ide tu predovšetkým o úlohy vyžadujúce určitý stupeň zručnosti a inteligencie. Zlúčenie uvedených vlastností nám ponúka výhody, ku ktorým bezpodmienečne patrí dosiahnutie kontinuálnej výroby bez potreby zastavenia robota, a to aj počas prítomnosti osoby v pracovnej oblasti robota.
Humanoidný robot a robotický Co-Worker
Mnohé výrobné podniky dnes začínajú čoraz viac uvažovať a implementovať do svojej výroby robotické pracoviská nielen so zreteľom na bezpečnosť, presnosť alebo rýchlosť, ale dnešné technologické pokroky v oblasti priemyselnej automatizácie lákajú výrobcov k tomu, aby spájali schopnosti robotov pri kooperácii s človekom. Vo svete sa v súvislosti s takýmto robotom, schopným pracovať po boku človeka a zároveň s ním spolupracovať, zaviedol pojem „co-worker" (asistent, spolupracovník). Takýto robot, schopný kooperácie s človekom, vo výrobnom závode na procesnej úrovni podniku dostal názov „co-bot" (kooperujúci robotický asistent, spolupracovník). Za takýchto robotických asistentov už viac nepovažujeme bežné priemyselné roboty chránené bezpečnostnými prvkami, ako sú oplotenia, bezpečnostné kamery či svetelné závory, ale roboty umiestnené na pracovisku priamo v pracovnom priestore človeka, mimo bezpečnostných oplotení. Takýto kooperujúci robotický asistenti majú rad istých výhod, pre ktoré sú vhodné nielen pre veľké výrobné závody, ale aj pre stredné a malé podniky s malosériovou alebo kusovou výrobou, s obmedzeným pracovným priestorom či finančnými prostriedkami spojenými s počiatočnou investíciou robota, finančnými nákladmi na expertov v oblasti programovania, kalibrácie, servisu a podobne. S cieľom dosiahnuť čo najjednoduchší spôsob kooperácie človek a robota, ako aj komunikácie medzi nimi, motivuje výrobcov robotov k implementácii ľudských vlastností do robotických systémov. Ide predovšetkým o neverbálny spôsob komunikácie, teda o pohyby tela, na ktoré dokáže robot reagovať. Mnohí výrobcovia sa však špecializujú nielen na správanie sa robotov v spoločnosti, ale aj na ich konštrukciu a dizajn, čím sa dostávame k novo zavedenému celosvetovému pojmu „humanoid" (robot, ktorý svojou konštrukciou a dizajnom pripomína črty človeka).
Humanoidný robot
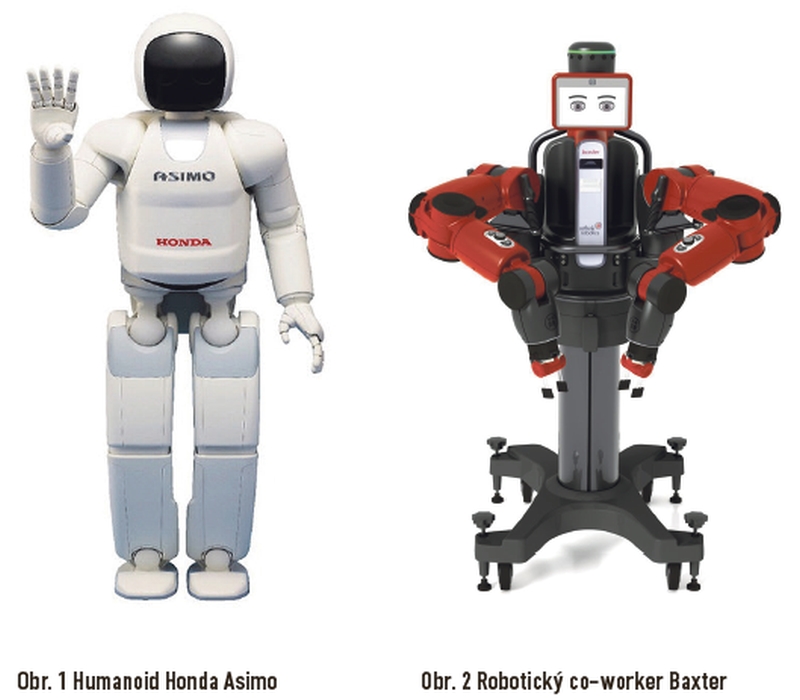
Humanoidný robot je vo všeobecnosti definovaný ako programovateľný stroj, ktorý môže imitovať rovnako ľudský výzor, ako aj jeho správanie. Humanoidný robot má dve hlavné funkcie, ktorými sú schopnosť prijímať informácie z prostredia okolo seba a schopnosť vykonávať fyzickú prácu, ako je napríklad manipulácia s objektmi. Po rokoch výskumov a štúdia majú dnešné humanoidné roboty rôzne veľkosti a tvary modifikované predovšetkým pre ich špecifickú oblasť pôsobenia. Vo všeobecnosti však môžeme tvrdiť, že spoločnou črtou humanoidov je ich spôsob správania sa podobný človeku, teda schopnosť vyjadrovať ich emócie pohybom očí, úst a podobne. Okrem iného disponujú rukami a nohami, vďaka čomu sú schopné vykonávať aktivity podobné tým ľudským, ako aj senzormi rozmiestnenými po svojej konštrukcii, vďaka ktorým dokážu vnímať svoje okolie, učiť sa a následne reagovať na dané zmeny v okolí. Príklad humanoidného robota môžeme vidieť na obr. 1.
Robotický co-worker
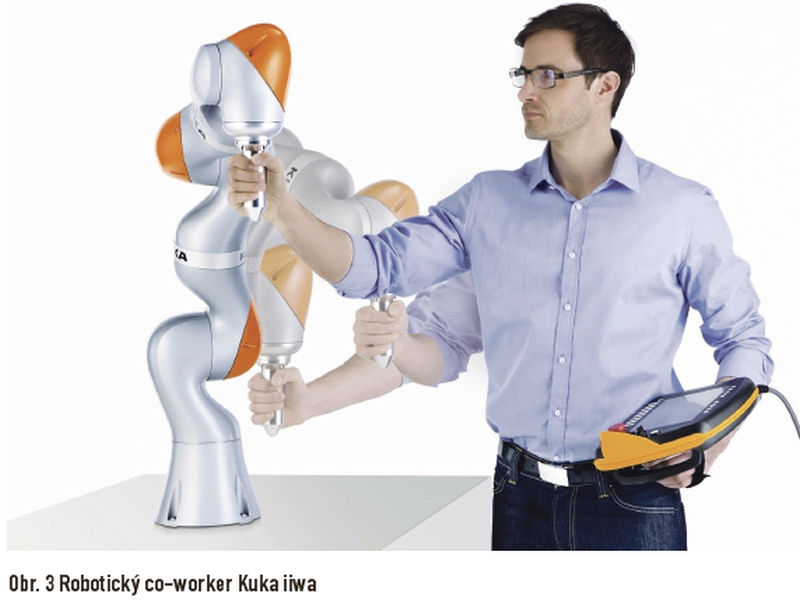
Ak vo všeobecnosti popíšeme co-workerov, tak sú to dvojramenné (jednoramenné) roboty osadené na statickom torze, prípadne na mobilnom podvozku. Zväčša bývajú vybavené zobrazovacím systémom v podobe humanoidnej hlavy určenej na základnú komunikáciu s človekom. V prídavnej výbave mávajú doplnené systémy rozpoznávania obrazu, navádzacie systémy, manipulačné systémy a podobne. Tieto technológie umožňujú okrem už spomínanej priamej kooperácie robota s človekom na jednom pracovisku aj detekciu konkrétneho operátora pracujúceho na danom pracovisku pomocou spracovania obrazu a následnú zmenu výrobných postupov podľa vopred definovaných požiadaviek samotného operátora. Zároveň v prípade akejkoľvek zmeny je možné robota používateľsky jednoducho pomocou gest a manipuláciu s ním preprogramovať a rekonfigurovať na inú činnosť. Spojenie týchto technických možností vytvára obrovský potenciál ich použitia práve v priemyselných aplikáciách. V súčasnosti sú však ich samotné priemyselné aplikácie vo svete veľmi zriedkavé. Príklad robotických co-workerov môžeme vidieť na obrázkoch (obr. 2 a 3).
Záver
V dnešnej dobe sú popisované roboty určené na priamu kooperáciu človek a robota vo výrobných závodoch skôr výnimočnosťou než samozrejmosťou. Samotná problematika takýchto robotov, schopných bezpečne kooperovať s človekom, je veľmi rozsiahla. Pri ich návrhu je potrebné dodržiavať bezpečnostné predpisy uvedené v normách a pritom mať na zreteli spoľahlivosť, presnosť, funkcionalitu a podobne.
Na roboty takéhoto druhu sa však netreba pozerať ako na nepriateľov, ale predovšetkým ako na pomocníkov pri práci operátorov, prinášajúcich odbremenenie pracovnej sily výrobných závodov od monotónnych či zdravie ohrozujúcich prác.
Poznámka: Príspevok je súčasťou riešenia grantovej úlohy KEGA 065ŽU-4-2014.
TEXT/FOTO Ing. Peter Marčan, Ing. Ján Rofár, PhD, Prof. Ing. Branislav Mičieta, PhD, Žilinská univerzita v Žiline, Strojnícka fakulta, Katedra priemyselného inžinierstva