Navrhovanie chápadiel priemyselných robotov je tvorivá konštruktérska činnosť, pri ktorej môžu byť inžinierske skúsenosti a myslenie podporené použitím vytváraných prototypov. K efektívnym možnostiam výroby prototypov robotických chápadiel patria metódy Rapid Prototyping. Článok popisuje proces tvorby jednoduchého prototypu chápadla za účelom jeho rozmerovej verifikácie.
Rameno priemyselného robota je spravidla ukončené pracovnou hlavicou s efektorom, ktorý vykonáva požadované operácie, alebo realizuje ľubovoľnú aplikáciu priemyselnej technológie. Manipulované predmety majú rozličné rozmery, formu, hmotnosť, ale aj rozmanité fyzikálne vlastnosti. Chápadlá, technologické hlavice a efektory patria k vymeniteľným prvkom priemyselných robotov. Môžu sa navyše skladať z vymeniteľných pracovných prvkov (čeľustí, prísaviek). V súčasnosti je dostupné veľké množstvo konštrukčne rozmanitých chápadiel, ktoré a líšia funkčným princípom, technologickými možnosťami, možnosťou použitia a mnohými inými atribútmi [1, 2].
Efektívnou a progresívnou výrobou prototypov sú technológie Rapid Prototyping. Vďaka charakteru svojich funkčných princípov orientovaných do oblasti podobnej tlači priniesli oproti zastaraným ručným spôsobom výroby prototypov nové možnosti súvisiace s využitím CAD dát, čo umožnilo tvorbu prototypov rýchlejším a jednoduchším spôsobom. Do oblasti Rapid Prototyping patria technológie ako Stereolithography (SLA), Selective Laser Sintering (SLS) a Fused Deposition Modelling (FDM). Tieto technológie sú výborným riešením prototypovania pre oblasť navrhovania a výroby robotických chápadiel a ich súčastí, či už ide o jedinečné špeciálne, alebo štandardizované vymeniteľné kusy [3].
NÁVRH CHÁPADLA ROBOTA
Príspevok popisuje realizáciu prototypu jednoduchého uchopovacieho efektora určeného na manipuláciu objektov. Jeho rozmery vychádzajú z rozmerov uvažovaných objektov – kovových obrobkov, pričom ich charakteristický uchopovaný rozmer nepresahuje 130 mm. Tvar obrobkov je jednoduchý (valce, hranoly). Návrhová časť rieši tvar a rozmery jednotlivých častí chápadla, pričom zaručuje možnosť vyvinutia potrebnej prítlačnej uchopovacej sily.
Modely jednotlivých súčastí boli vytvorené v systéme Pro/Engineer Wildfi re 5. Obr. 1 ponúka pohľad na štyri súčasti efektora a model prevodovej bázy. Na obr. 2 je následne v ich kombinácii zobrazená pripravovaná zostava. Celý návrh a jeho jednotlivé časti vyplývajú zo známeho určeného člena, ktorým je efektorová báza, obsahujúca časti prevodového mechanizmu chápadla. Táto báza vďaka svojej konštrukcii zároveň zaručuje jeho vymeniteľnosť.
 |
 |
Jednotlivé časti chápadla a ich uloženie do zostavy boli vyriešené tak, aby sprostredkovali potrebné stupne voľnosti v osiach (kĺboch) pohybu. Celkovo bolo v zostave vytvorených 12 dynamických rotačných väzieb typu Pin. V CAD module Mechanism boli následne vykonané pohybové simulácie spojení, ktoré potvrdili nezávadnosť navrhnutých častí a vyhovujúce rozmery [4].
VÝROBA PROTOTYPU CHÁPADLA

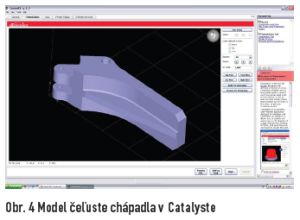
Tlačiareň disponuje vlastnou riadiacou jednotkou s operačným systémom. K PC je pripojená formou sieťového LAN rozhrania. Softvérovou podporou procesu tlače na tomto zariadení je program Catalyst, ktorý plne podporuje štandardný výmenný formát CAD objektov STL. V tomto formáte boli preto uložené aj všetky tri navrhnuté časti chápadla.
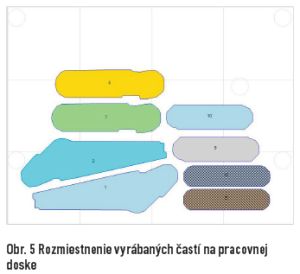
Po importovaní modelu do prostredia programu Catalyst je potrebné zorientovať ho do požadovanej tlačovej polohy, čo znázorňuje obr. 4. Obr. 5 znázorňuje realizáciu dispozície tlačovej zostavy. Tmavo šrafované party vpravo dolu nespĺňajú požiadavku minimálnej potrebnej medzery. Úlohou používateľa je zabezpečiť ich vhodné umiestnenie presunutím.
 |
 |
Po vytlačení všetkých potrebných súčastí v požadovaných množstvách bola s využitím normalizovaných spájacích súčastí poskladaná zostava prototypu chápadla zobrazená na obr. 6 [5].
Vytvorený prototyp bol nainštalovaný na rameno malého robota spoločnosti ABB s radovým označením IRB 140, čo znázorňuje obr. 7.
 |
 |
Tvorba prototypu chápadla sa ukázala ako veľmi progresívny spôsob verifikácie návrhu, pričom je možnosť 3D tlače vysoko efektívnou metódou výroby takéhoto prototypu. Aplikácia metód Rapid Prototyping v oblasti prototypovania chápadiel priemyselných robotov môže byť veľmi vhodným postupom v situáciách, keď uvažujeme o vlastných návrhoch chápadiel a ich výrobe.
Poznámka: Príspevok bol spracovaný s prispením grantovej agentúry VEGA, č. 1/0032/12, KEGA č. 002TUKE-4/2012 a ASFEU ITMS projekt 26220220125.
TEXT/FOTO PROF. ING. JOZEF NOVÁK-MARCINČIN A KOL., FAKULTA VÝROBNÝCH TECHNOLÓGIÍ SO SÍDLOM V PREŠOVE, TECHNICKÁ UNIVERZITA V KOŠICIACH
Spoluautori: PhD., Ing. Miroslav Janák, PhD., Ing. Jozef Barna, PhD., Ing. Ľudmila Nováková-Marcinčinová
LITERATÚRA:
[1] J. N. Marcincin, M. Janak, J. Barna, J. Torok, L. N. Marcincinova, V. Fecova, Verifi cation of a Program for the Control of a Robotic Workcell with the Use of AR. International Journal of Advanced Robotic Systems, Vol. 9, Aug 2012, p. 54-54, ISSN 1729-8806.
[2] J. Novak-Marcincin, J. Barna, L. Novakova-Marcincinova, V. Fecova, Analyses and Solutions on Technical and Economical Aspects of Rapid Prototyping Technology. Tehnicki Vjesnik, Vol. 18, No. 4, 2011, pp. 657-661, ISSN 1330-3651.
[3] C. K. Chua, K. F Leong, C. S. Lim, Rapid Prototyping: Principles and Applications. World Scientifi c Publishing, Singapore, 2004.
[4] J. Novak-Marcincin, L. Novakova-Marcincinova, J. Barna, M. Janak: Application of FDM rapid prototyping technology in experimental gearbox development process. Tehnicki Vjesnik, vol. 19, no. 3, 2012, p. 689-694, ISSN 1330-3651.
[5] J. Novak-Marcincin, M. Janak, L. Novakova-Marcincinova, Increasing of Product Quality Produced by Rapid Prototyping Technology. Manufacturing Technology, Vol. 12, No. 12, 2012, p. 71-75, ISSN 1213-2489.