Manipulácia s objektmi je podstatnou súčasťou výrobného procesu. Obvykle je potrebná najmä na začiatku a na konci výrobného procesu. Na začiatku zabezpečuje vstup materiálu do výrobného procesu (vyberanie z europaliet/debien, depaletizácia a pod.). Na konci je zasa nevyhnutná pre prípravu materiálu alebo polotovaru na transport (paletizácia, ukladanie do prepraviek/košov a pod.).
Manipulácia s objektmi je podstatnou súčasťou výrobného procesu. Obvykle je potrebná najmä na začiatku a na konci výrobného procesu. Na začiatku zabezpečuje vstup materiálu do výrobného procesu (vyberanie z europaliet/debien, depaletizácia a pod.). Na konci je zasa nevyhnutná pre prípravu materiálu alebo polotovaru na transport (paletizácia, ukladanie do prepraviek/košov a pod.).
Nakoľko manipulácia neprináša pridanú hodnotu samotnému výrobku, býva považovaná za stratu. Je súčasťou takzvaných sedem hriechov straty – TIMWOOD:
Transport – preprava
Inventory – zásoby
Motion – pohyb/manipulácia
Waiting – čakanie
Over-processing – komplikované procesy
Overproduction – nadvýroba
Defects – chybná výroba
Každý z týchto javov sa snažíme eliminovať, aby sme dosiahli štíhlu a efektívnu výrobu. K tomu nám napomáha aj moderná robotika.
Moderná robotika ako nástroj odstraňovania straty
Pod modernou robotikou alebo robotikou pripravenou pre Industry 4.0 rozumieme takú formu, ktorá je schopná reagovať na svoje vstupy, je modulárna a ľahko prispôsobiteľná zmenám. Pevne naprogramované roboty na manipuláciu objektov z bodu A do bodu B (v presne definovanej polohe) nemôžu spĺňať nami definovanú modernú robotiku. Tá v sebe obsahuje aj prvok, ktorý napomáha rozpoznaniu objektov, a tým je kamerový systém.
Väčšina spoločností má skúsenosti najmä s 2D kamerami, ktoré sú náročné na implementáciu hlavne z pohľadu presnej kalibrácie a stabilných svetelných podmienok. Takto postavený systém je pomerne ľahké „rozladiť”, nakoľko nie je odolný voči zmenám a osvetleniu. Nižšie zaobstarávacie náklady na samotný hardvér bývajú často navýšené o dodatočné služby a integráciu. Na rozdiel od 2D kamier, 3D optické systémy prinášajú odolnosť a ľahkosť implementácie.
 |
| 3D sken busty vytvorený pomocou skenera PhoXi S určeného na skenovanie menších dielcov. |
Úspech moderného vision systému robota spočíva v kvalite 3D skenera
Veľké množstvo úloh zlyhávalo v minulosti najmä kvôli nekvalitným výstupom z 3D skenerov. Pre manipulovanie s náhodne uloženými objektmi v europaletách alebo prepravkách (Bin Picking) je nevyhnutná kvalita samotného výstupu tzv. point cloudu, čiže zhluku bodov. Aký kvalitný je tento výstup, taká presná je samotná manipulácia.
Bin Picking ako pojem pre odoberanie náhodne uložených dielov je známy už niekoľko desaťročí, ale je len málo spoločností, ktoré sú natoľko technologicky vyspelé, aby tento problém zvládli, pretože sa v ňom spájajú viaceré odbory, a to najmä strojové videnie a robotika.
Druhým faktorom je čas, za ktorý je priestor, v ktorom manipulujeme, zosnímaný. Je len málo skenerov na trhu, ktoré ponúkajú vysokú kvalitu skenu za zlomok sekundy.
Manipulácia s náhodne uloženými objektmi – Bin Picking
Nejde len o odoberanie náhodne usporiadaných dielov v europaletách, prepravkách či košoch, ale aj o odoberanie objektov, ktoré môžu prichádzať neorientované na páse. Inteligentné vyhľadanie objektov a manipulácia s nimi sú tiež potrebné pri depaletizovaní náhodne uložených škatúľ na paletách.
Moderná manipulácia je zložená z troch základných prvkov:
1. Skenovanie objektov v 3D – hardvér
Skenovaním sa začína proces manipulácie s objektom. Môže ísť o skenovanie predmetov rôznej veľkosti, materiálu a tvaru. Veľkosť prepraviek tak isto môže variovať.
2. Lokalizácia objektov
Systémy pripravené na éru Industry 4.0 umožňujú jednoduché nastavenie lokalizačných algoritmov len pomocou nahratia CAD modulu dielu alebo objektu. Následne sa uskutoční vyhľadávanie vhodného objektu na odobratie. V tomto procese sa už berie do úvahy aj tvar a veľkosť uchopovača aby nedochádzalo k mikrokolíziám s iným dielom pri odoberaní.
3. Plánovanie cesty pohybu robota na odobranie dielu
Dôležitou súčasťou manipulácie novej generácie je plánovanie trasy robota. Tento krok zabezpečuje aby robot nenarazil niektorým zo svojich kĺbov do debny alebo iných objektov v okolí prostredia, z ktorého sa objekt vyberá. Moderný manipulačný systém na seba preberá celé kĺbové riadenie robota, keďže výrobcovia robotov túto funkcionalitu neponúkajú a nepočítajú s ňou.
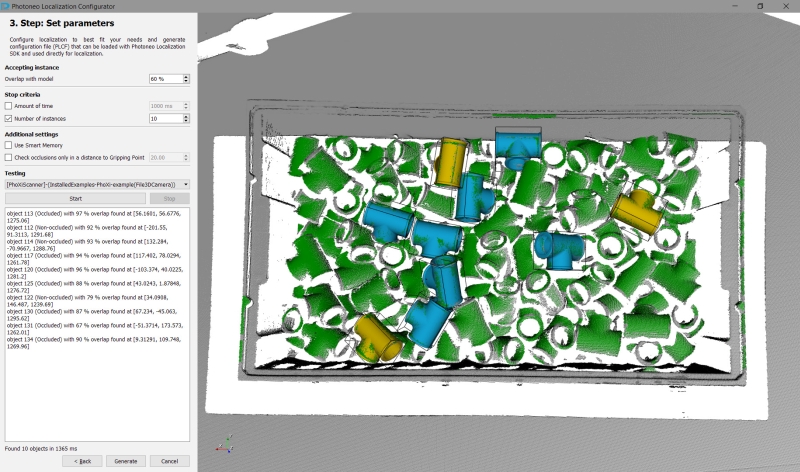 |
| Ukážka softvérového balíka Lokalizácie. Na základe CAD modelu sa lokalizuje diel v scéne a vracia sa súradnica vybraného bodu v robotickej koordinačnej sústave. |
Základné piliere Bin Pickingu
Na úvod poznamenajme, že aplikácia Bin Pickingu nemá vo svojej podstate nič s klasickou robotikou ani funkcionalitou robota ako takou. Robot v tejto aplikácii predstavuje len hrubý nástroj na vyberanie objektu bez akejkoľvek logiky. Celá logika aplikácie je postavená na už zmienených troch pilieroch a to: 3D skener (kvalita skenu), robustnosť lokalizačného algoritmu a plánovanie cesty pre robota. Z vonkajšieho pohľadu neviditeľné softvérové komponenty predstavujú nosnú časť tejto aplikácie. Postup, akým aplikácia v skratke funguje je, že 3D skener naskenuje objekty. V tomto snímku sa následne na základe CAD modelu objektu lokalizuje vhodný objekt na odobratie a zároveň sa prepočíta najlepšia cesta pre robota, ako pristúpiť k danému objektu tak, aby nenarazil do ničoho naokolo.
Trendy robotickej manipulácie
Najbližšie desaťročia nám prinesú nový trend robotiky, a to robotiky schopnej reagovať na meniace sa vstupy, produkty a pohyby človeka. Photoneo – slovenský výrobca a priekopník v oblasti 3D skenerov a 3D kamier, prispieva k nástupu tohto trendu svojím inovatívnym portfóliom hardvérových a softvérových produktov.
Moderná robotika musí byť schopná pracovať v meniacom sa prostredí nielen kvôli stúpajúcim možnostiam customizácie produktov a s tým spojenej variability výroby, ale aj kvôli nástupu kolaboratívnej robotiky. Budúce pracoviská, kde bude človek kooperovať s robotom, budú mať oveľa vyššie požiadavky na vision systém, ktorý bude musieť okrem rozpoznávania jednotlivých polotovarov, dielcov a nástrojov zároveň monitorovať aj pohyby človeka a zabezpečiť v každom okamihu dynamické riadenie pohybov robota, aby nedochádzalo ku zbytočným stretom so zamestnancom.
 |
| Portfólio PhoXi 3D skenerov predstavuje 5 modelov. Výber modelu závisí na objeme skenovaného priestoru |
O spoločnosti Photoneo – slovenskom priekopníkovi v oblasti 3D
Photoneo prináša na trh inovatívne produkty v oblasti 3D vision systémov v podobe PhoXi 3D skenera a unikátnej PhoXi 3D kamery. Unikátnosť produktov spočíva v ich fyzickom a algoritmickom vyhotovení. 3D skener je určený na skenovanie statických objektov a ponúka jedinečnú kombináciu kvality skenu za veľmi krátky čas. Portfólio 3D skenerov predstavuje päť modelov v závislosti od veľkosti skenovaných objektov, od veľmi presného skenera pre kontrolu dosiek plošných spojov až po skener na skenovanie celých častí karosérie auta.
Zakladatelia spoločnosti Photoneo sú zároveň aj autormi unikátnej a patentovanej technológie snímania objektov v 3D v pohybe. Na tejto technológii bude postavená aj 3D kamera, ktorú spoločnosť aktuálne vyvíja a predstaví v budúcom roku. Proces vývoja je pomerne zložitý, kamera bude používať vlastný CMOS čip – obrazový snímač. Hlavným benefitom novej kamery bude vysoké rozlíšenie skenu pri rýchlosti snímania 30 FPS. Prakticky to bude znamenať nové možnosti manipulácie s objektami pre mobilnú a humanoidnú robotiku.
Na softvérovej strane spoločnosť ponúka vlastné algoritmy na lokalizáciu objektov a plánovanie cesty pre pohyb robotov. Cieľom spoločnosti je vytvoriť také softvérové nástroje, aby aj klienti bez skúseností s vision systémom mohli len pomocou zmeny niekoľkých parametrov nastaviť celú aplikáciu Bin Pickingu. V nasledujúcom roku spoločnosť predstaví zaujímavý nástroj – online simuláciu Bin Pickingu, ktorá umožní zákazníkom len na základe CAD modelov simulovať odoberanie objektov s reálnymi fyzikálnymi zákonitosťami. Výhodou pre zákazníka bude, že si vyskúša uchopovač online z pohodlia kancelárie, namiesto zdĺhavej výroby a mechanického skúšania.
TEXT/FOTO Ing. Branislav Puliš